img077

77
6.4. Metoda uczenia maszyny
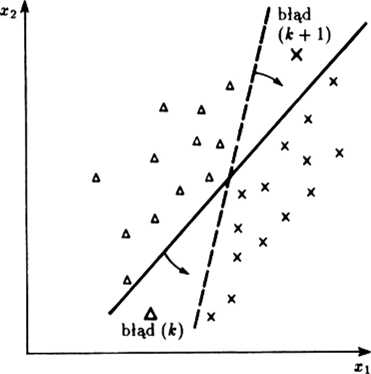
Rys. 6.7. Poprawka położenia linii granicznej spowodowana przez jeden błędnie sklasyfikowany punkt (gwiazdka) wywoła błędne sklasyfikowanie już uprzednio poprawnie rozpoznawanych punktów (trójkąt) i kolejne korekty w przeciwną stronę
gdy rozdzielenie za pomocą hiperpłaszczyzn jest w ogóle wykonalne lub -formułując to samo inaczej - gdy istnieją funkcje postaci (58), pozwalające na bezbłędne rozpoznawanie. Mimo tego ograniczenia teza twierdzenia jest bardzo mocna; głosi ona, że stosując wzory (66) i (67) zawsze znajdziemy rozwiązanie i to po skończonej liczbie prezentacji obiektów ciągu uczącego (który w razie potrzeby - gdyby niezbędna liczba pokazów okazała się większa od N - może być prezentowany cyklicznie).
Pokażmy teraz strukturę algorytmu uczenia. Musimy jednak do wcześniej wprowadzonych informacji i założeń dodać kilka dodatkowych zmiennych:
count - licznik powtórzeń prezentacji ciągu uczącego,
limit - maksymalna liczba pokazów, po której przerywa się cykliczne przeszukiwanie ciągu uczącego sygnalizując niepowodzenie procesu uczenia,
Wyszukiwarka
Podobne podstrony:
img075 75 6.4. Metoda uczenia maszyny Należy zauważyć, że w procesie uczenia ulegają zmianie jedynie
IMG077 77 77 Rys. 6,l6 Ilustracja rozwiązanie przysiadu 6.6.7 Rozwiązanie V celu zapisania równań ob
9 Rys.9. Układ do pomiaru przemieszczeń liniowych w osi maszyny 5.2. Pomiary: A. Rozrzut położeń i l
img077 77 Rozdział 6. Sieci rezonansowe neuronie) podali w kilku swoich oryginalnych pracach Gaił Ca
img077 77 77(45) Ifzóz (43) pozwala w łatwy sposób obliczyć dokładność Kolego nouiu-sza jako iloraz
img077 77 niżej częstotliwości nośnej) oraz górnę (powyżej częstotliwości nośnej). Każda z tych wstę
img077 77 Schemat analizatora gazu przedstawiono na rysunku 24 j Jeat to nie-arćwnoważony mostek pry
img079 79 6.5. Metoda funkcji nieliniowych (rys. 6.6), pochodzące od ciągłych obrotów płaszczyzny gr
więcej podobnych podstron