0000062
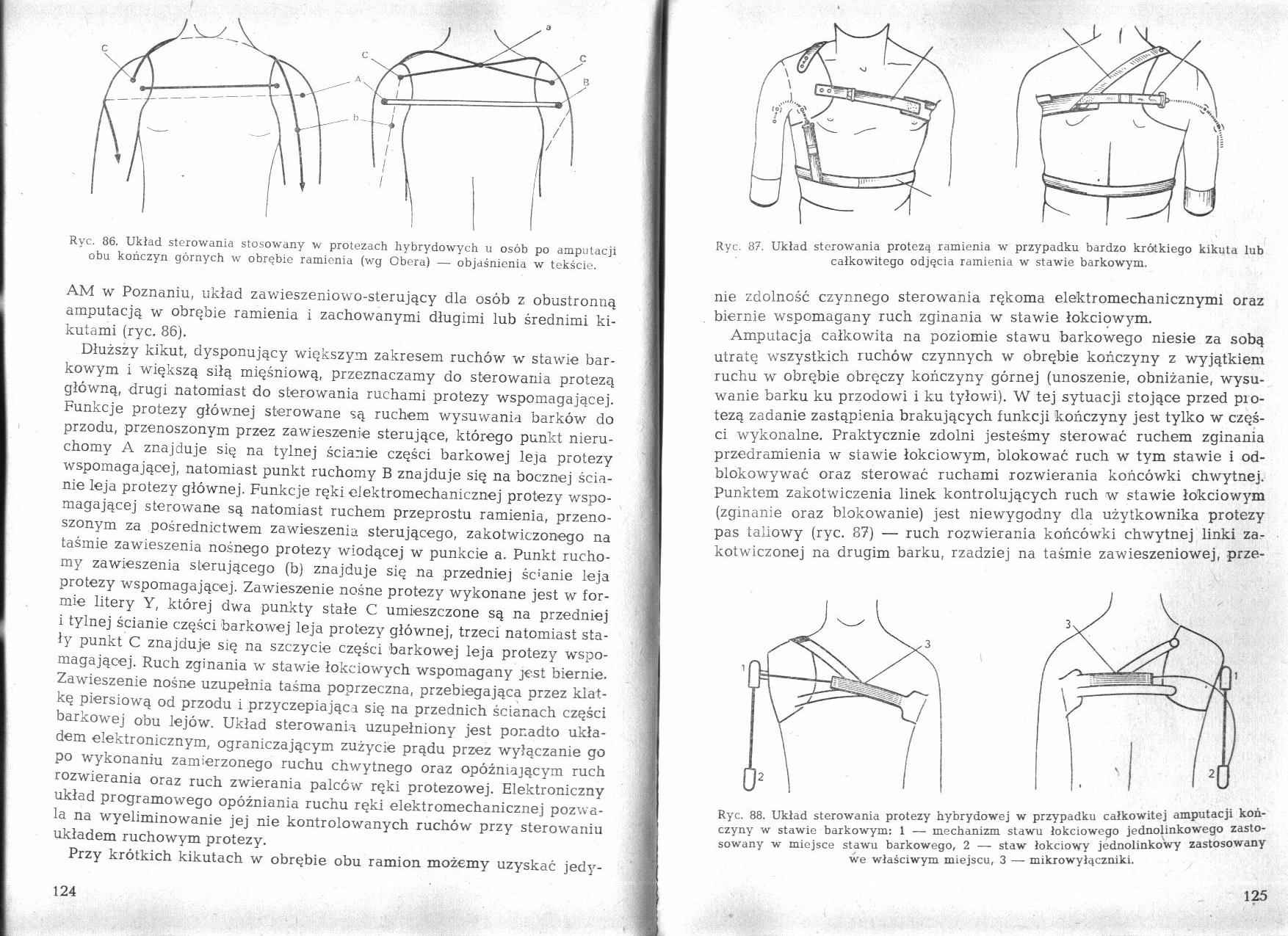
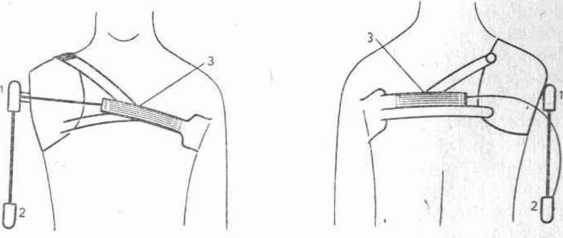
Ryc. 86. Układ sterowania stosowany w protezach hybrydowych u osób po amputacji
obu kończyn górnych w obrębie ramienia (wg Obora) — objaśnienia w tekście.
AM w Poznaniu, układ zawieszeniowo-sterujący dla osób z obustronną amputacją w obrąbie ramienia i zachowanymi długimi lub średnimi kikutami (ryc. 86).
Dłuższy kikut, dysponujący większym zakresem ruchów w stawie barkowym i większą siłą mięśniową, przeznaczamy do sterowania protezą główną, drugi natomiast do sterowania ruchami protezy wspomagającej. Funkcje protezy głównej sterowane są ruchem wysuwania barków do przodu, przenoszonym przez zawieszenie sterujące, którego punkt nieruchomy A znajduje się na tylnej ścianie części barkowej leja protezy wspomagającej, natomiast punkt ruchomy B znajduje się na bocznej ścianie leja protezy głównej. Funkcje ręki elektromechanicznej protezy wspomagającej sterowane są natomiast ruchem przeprostu ramienia, przenoszonym za pośrednictwem zawieszenia sterującego, zakotwiczonego na taśmie zawieszenia nośnego protezy wiodącej w punkcie a. Punkt ruchomy zawieszenia sterującego (b) znajduje się na przedniej śc;anie leja protezy wspomagającej. Zawieszenie nośne protezy wykonane jest w formie litery Y, której dwa punkty stałe C umieszczone są na przedniej i tylnej ścianie części barkowej leja protezy głównej, trzeci natomiast stały punkt C znajduje się na szczycie części barkowej leja protezy wspo-magającej. Ruch zginania w stawie łokciowych wspomagany jest biernie. Zawieszenie nośne uzupełnia taśma poprzeczna, przebiegająca przez klatkę piersiową od przodu i przyczepiająca się na przednich ścianach części barkowej obu lejów. Układ sterowunia uzupełniony jest ponadto układem elektronicznym, ograniczającym zużycie prądu przez wyłączanie go po wykonaniu zamierzonego ruchu chwytnego oraz opóźniającym ruch rozwierania oraz ruch zwierania palców ręki protezowej. Elektroniczny układ programowego opóźniania ruchu ręki elektromechanicznej pozwala na wyeliminowanie jej nie kontrolowanych ruchów przy sterowaniu układem ruchowym protezy.
Przy krótkich kikutach w obrębie obu ramion możemy uzyskać jedy-
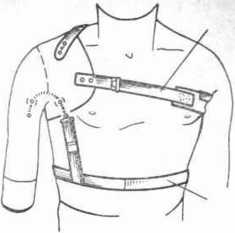
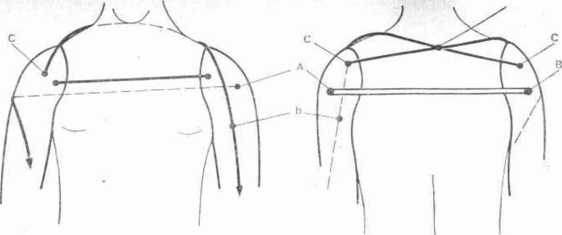
Ryc. 87. Układ sterowania protezy ramienia w przypadku bardzo krótkiego kikuta lub całkowitego odjęcia ramienia w stawie barkowym.
nie zdolność czynnego sterowania rękoma elektromechanicznymi oraz biernie wspomagany ruch zginania w stawie łokciowym.
Amputacja całkowita na poziomie stawu barkowego niesie za sobą utratę wszystkich ruchów czynnych w obrębie kończyny z wyjątkiem ruchu w obrębie obręczy kończyny górnej (unoszenie, obniżanie, wysuwanie barku ku przodowi i ku tyłowi). W tej sytuacji stojące przed pio-tezą zadanie zastąpienia brakujących funkcji kończyny jest tylko w części wykonalne. Praktycznie zdolni jesteśmy sterować ruchem zginania przedramienia w stawie łokciowym, blokować ruch w tym stawie i odblokowywać oraz sterować ruchami rozwierania końcówki chwytnej. Punktem zakotwiczenia linek kontrolujących ruch w stawie łokciowym (zginanie oraz blokowanie) jest niewygodny dla użytkownika protezy pas taliowy (ryc. 37) — ruch rozwierania końcówki chwytnej linki zakotwiczonej na drugim barku, rzadziej na taśmie zawieszeniowej, prze-
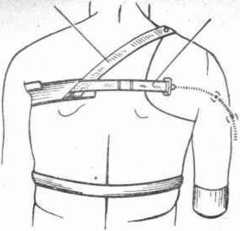
Ryc. 88. Układ sterowania protezy hybrydowej w przypadku całkowitej amputacji kończyny w stawie barkowym: 1 — mechanizm stawu łokciowego jednolinkowego zastosowany w miejsce stawu barkowego, 2 — staw łokciowy jednolinkowy zastosowany we właściwym miejscu, 3 — mikrowyłgezniki.
125
Wyszukiwarka
Podobne podstrony:
CCF20091008�117 Ryc. 86. Układ optyczny mikroskopu elektronowego (wg A. Zboińskiego, 1990): 1 — term
0000060 (7) Protezowarde wad wrodzonych Ryc. 51. Dziecko z wrodzonym brakiem obu kończyn górnyc
Rozwój protetyki stomatologicznej Ryc. 17. Proteza hybrydowa w szczęce, a -optymalny komfort; nie je
Modelowanie napędu hybrydowego pojazdu kołowego sterowanego z wykorzystaniem ... Układ sterowania
Ryc. 60. Zasada sterowania protezą Sauerbrucha — mechaniczne przeniesienie siły przesuwu kurczącego
Kompletna struktura sterowania napędem hybrydowym została przedstawiona na rys. 3. Rys. 3. Układ ste
0000024 (19) Podstawy biomechaniki i protezowanla 29 Ryc. 11. Tymczasowy pilon stosowany w odjęciach
Image240 macierz wejść R -N+/ JJ nxr U(t) =0 Układ sterowalny i ob serwowalny macierz .
Zamknięty układ sterowania X 6 ► Urządzenie u Obiekt
Otwarty układ sterowania X Urządzenie u Obiekt (proces) sterujące sterowania x -
zenski1 Układ rozrodczy żeński (ryc. 2-4), lub układ płciowy żeński, składa się z narządów wewnętrzn
0000001 41 Ryc. 86. Ćwiczenie bierne kończyny dolnej. Ryc. 87. Skutki nieprawidłowego ćwiczenia. Nal
0000001 8 Ryc. 7b. Układ mięśniowy z tyłu. Proste odruchy motoryczne są niezależne od naszej woli.
więcej podobnych podstron