050 051 2
50 Programowanie liniowe
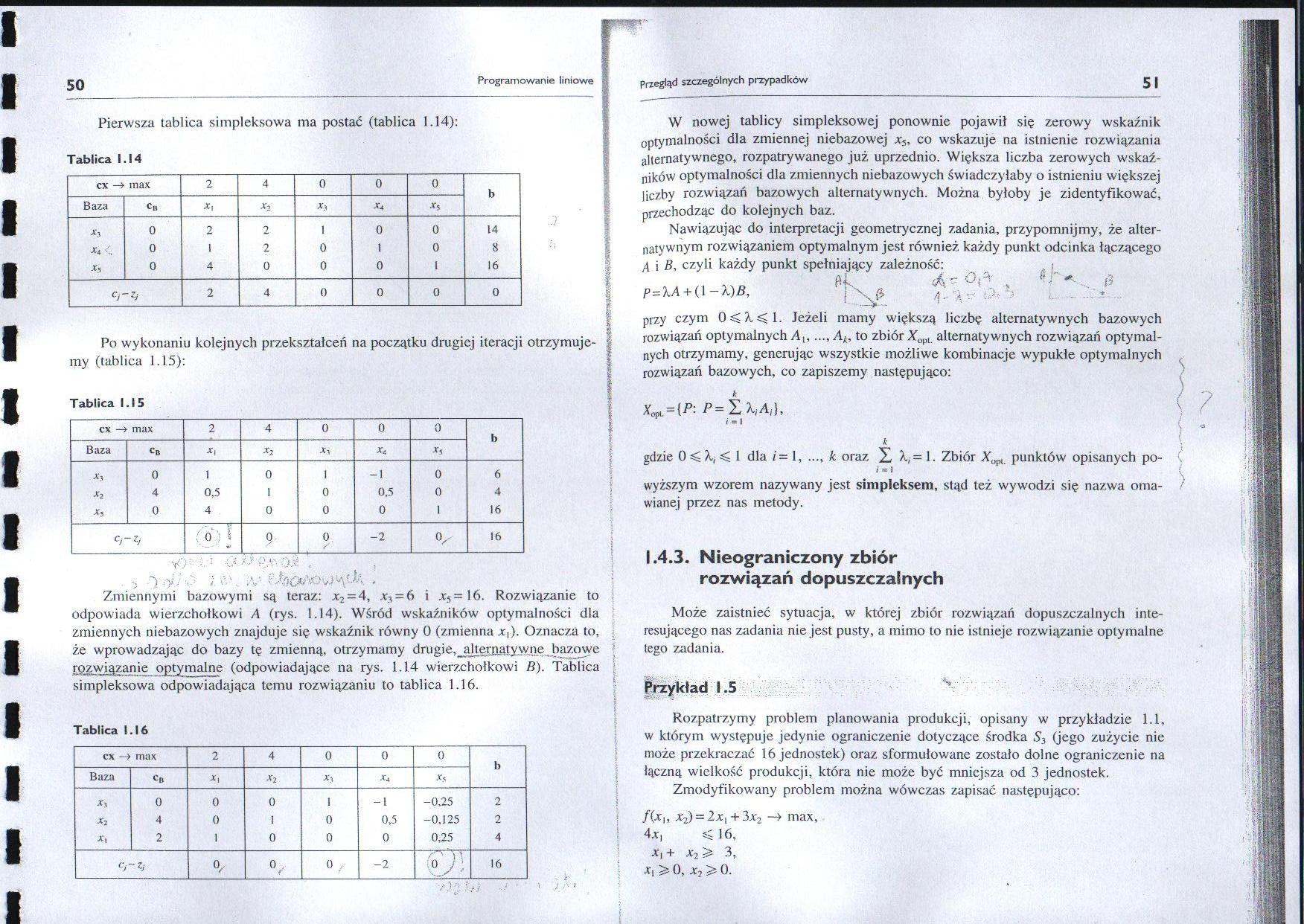
Pierwsza tablica simpleksowa ma postać (tablica 1.14):
Tablica 1.14
|
cx —» |
max |
2 |
4 |
0 |
0 |
0 |
b |
|
Baza |
CH |
x, |
*2 |
x3 |
*4 |
X* | |
|
0 |
2 |
2 |
i |
0 |
0 |
14 | |
|
X, < |
0 |
i |
2 |
0 |
1 |
0 |
8 |
|
x5 |
0 |
4 |
0 |
0 |
0 |
1 |
16 |
|
cr |
-Z; |
2 |
4 |
0 |
0 |
0 |
0 |
Po wykonaniu kolejnych przekształceń na początku drugiej iteracji otrzymujemy (tablica 1.15):
Tablica 1.15
|
cx |
max |
2 |
4 |
0 |
0 |
0 |
b | |
|
Baza |
CB |
X\ |
*2 |
*5 |
i | |||
|
x3 |
0 |
1 |
0 |
1 |
-1 |
0 |
6 | |
|
x2 |
4 |
0,5 |
1 |
0 |
0,5 |
0 |
4 |
> |
|
X5 |
0 |
4 |
0 |
0 |
0 |
1 |
16 |
\ |
|
cr |
' 0 1 |
Q |
0 |
-2 |
<V |
16 |
i i > |
yy ’ Ot ->■) ,
lv-' ;v *
Zmiennymi bazowymi są teraz: x2 = 4, x2 = 6 i *5=16. Rozwiązanie to odpowiada wierzchołkowi A (rys. 1.14). Wśród wskaźników optymalności dla zmiennych niebazowych znajduje się wskaźnik równy 0 (zmienna *,). Oznacza to, że wprowadzając do bazy tę zmienną, otrzymamy drugie, alternatywne bazowe ; rozwiązanie optymalne (odpowiadające na rys. 1.14 wierzchołkowi R). Tablica simpleksowa odpowiadająca temu rozwiązaniu to tablica 1.16.
<
Tablica 1.16
|
cx |
max |
2 |
4 |
0 |
0 |
0 |
b |
|
Baza |
c» |
*1 |
*2 |
Xy |
xA |
x* | |
|
0 |
0 |
0 |
l |
-i |
-0.25 |
2 | |
|
4 |
0 |
1 |
0 |
0,5 |
-0.125 |
2 | |
|
2 |
1 |
0 |
0 |
0 |
0,25 |
4 | |
|
cr |
~Zj |
0/ |
0 . f |
0 ,• |
-2 |
s ■ °. • |
16 |
W nowej tablicy simpleksowej ponownie pojawił się zerowy wskaźnik optymalności dla zmiennej niebazowej x5, co wskazuje na istnienie rozwiązania alternatywnego, rozpatrywanego już uprzednio. Większa liczba zerowych wskaźników optymalności dla zmiennych niebazowych świadczyłaby o istnieniu większej liczby rozwiązań bazowych alternatywnych. Można byłoby je zidentyfikować, przechodząc do kolejnych baz.
Nawiązując do interpretacji geometrycznej zadania, przypomnijmy, że alternatywnym rozwiązaniem optymalnym jest również każdy punkt odcinka łączącego

^ j B, czyli każdy punkt spełniający zależność:


przy czym 0 ^ ź. s: 1. Jeżeli mamy większą liczbę alternatywnych bazowych rozwiązali optymalnych A(.....Ak, to zbiór Xopt. alternatywnych rozwiązań optymal
nych otrzymamy, generując wszystkie możliwe kombinacje wypukłe optymalnych rozwiązań bazowych, co zapiszemy następująco:
k
Xop, = {P: P=Z\Ai),
i = I
k
gdzie 0 < kj < 1 dla / = 1, ..., k oraz X X, = 1. Zbiór Xopt punktów opisanych po-
wyższym wzorem nazywany jest simpleksem, stąd też wywodzi się nazwa omawianej przez nas metody.
1.4.3. Nieograniczony zbiór
rozwiązań dopuszczalnych
Może zaistnieć sytuacja, w której zbiór rozwiązań dopuszczalnych interesującego nas zadania nie jest pusty, a mimo to nie istnieje rozwiązanie optymalne tego zadania.
Przykład 1.5
Rozpatrzymy problem planowania produkcji, opisany w przykładzie 1.1, w którym występuje jedynie ograniczenie dotyczące środka S3 (jego zużycie nie może przekraczać 16 jednostek) oraz sformułowane zostało dolne ograniczenie na łączną wielkość produkcji, która nie może być mniejsza od 3 jednostek. Zmodyfikowany problem można wówczas zapisać następująco:
/{*•„ x2) = 2xi + 3jc2 —» max,
4.r, sj 16,
Wyszukiwarka
Podobne podstrony:
Slajd35 4 Metoda simpleks Uniwersalną metodą rozwiązywania programów liniowych jest algorytm simplek
Zad. 20. programowanie liniowe Znajdź metodą simpleks maksimum liniowej funkcji celu F(x) przy linio
050 051 50 * o 1 I 1 1 1 1 1 1 V • 1 • - 1 1 • 1 1 1 1 1
068 069 2 68 Programowanie liniowe Z powyższych warunków wynikają następujące wnioski:Warunek (1-14)
str 050 051 Sojusz z Rosją wiązał również z widokami własnych korzyści w postaci nadań majątkowych,
ola2 jpeg Równanie liniowej aproksymacji krzywej pomiarowej ma postać y =-0,1219x+0,2327 Ogólna post
084 085 2 84 Programowanie liniowe simpleks. Zmienną opuszczającą bazę jest x2. Otrzymujemy wówczas
Slajd40 3 Metoda simpleks Najogólniej ujmując, wyznaczenie rozwiązania zadania programowania liniowe
Slajd49 4 Metoda simpleks Jak już wspomniano, program liniowy może mieć więcej niż jedno rozwiązanie
038 039 2 38 Programowanie liniowe ograniczających miała postać: ~o~ 1 . o W tym celu wiersz drugi w
042 043 2 42 U Programowanie liniowe 42 U Programowanie liniowe Tablica
056 057 2 56 Programowanie liniowe 56 Programowanie liniowe Tablica 1.19 cx
058 059 2 58 Programowanie liniowe Tablica 1.20 cx
076 077 2 76 Programowanie liniowe nego, zapisanym w tablicy 1.7. Z kolei z tablicy tej odczytujemy
078 079 2 78 Programowanie liniowe Wykorzystując dualną metodę simpleks, wykonujemy kolejne iteracje
Klasyfikacja metod optymalizacji programowanie liniowe [metoda Simplex1 c^jjrogramowanie nieliniowej
Zagadnienie programowania liniowego - Algorytm SIMPLEX Algorytm SIMPLEX zagadnienia maksymalizacji f
więcej podobnych podstron