2tom321
9. URZĄDZENIA DO KOMPENSACJI MOCY BIERNEJ 644

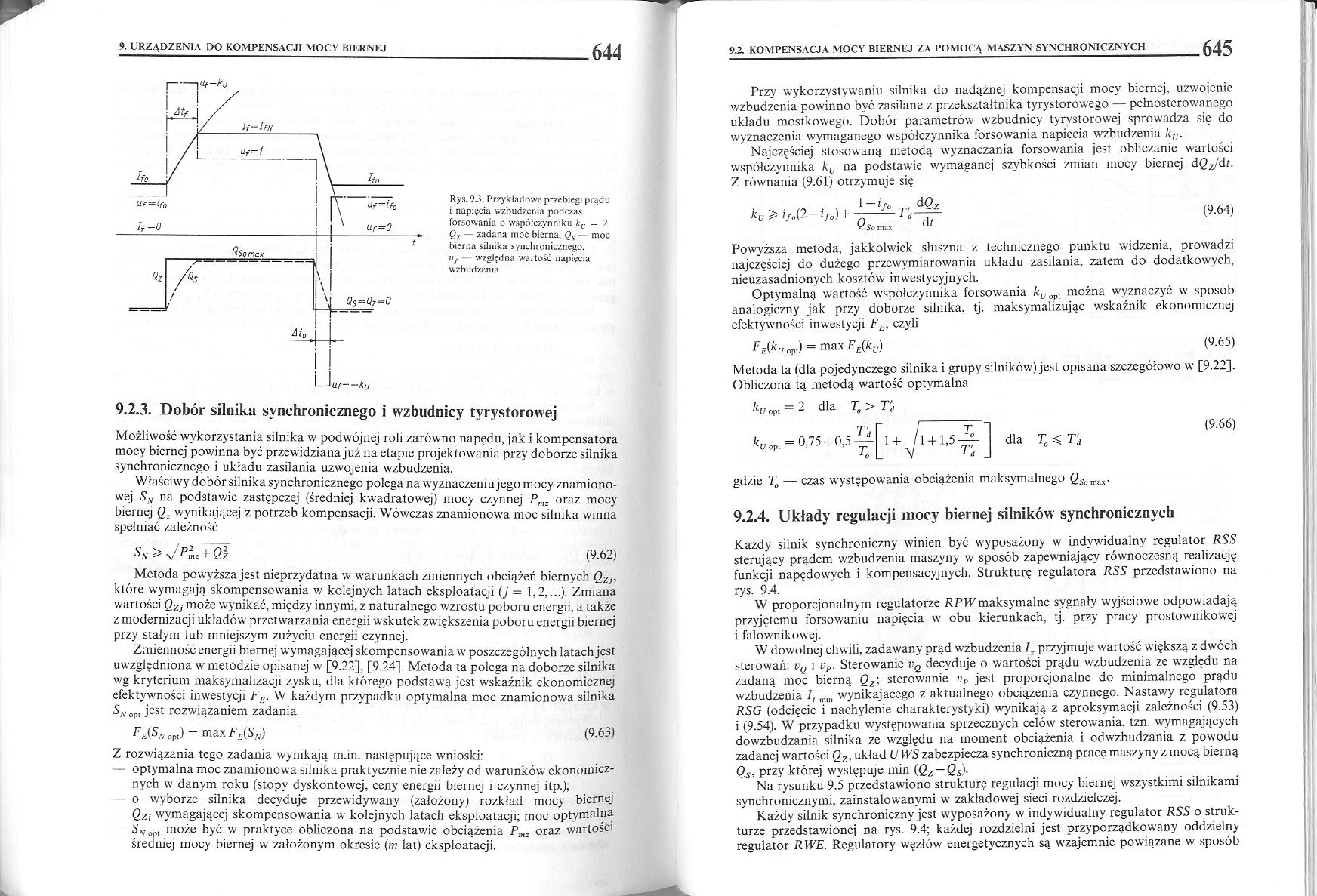
Rys. 9.3. Przykładowe przebiegi prądu i napięcia wzbudzenia podczas forsowania o współczynniku kv = 2 Qz — zadana moc bierna. Qs - moc bierna silnika synchronicznego,
Uj względna wartość napięcia wzbudzenia
9.2.3. Dobór silnika synchronicznego i wzbudnicy tyrystorowej
Możliwość wykorzystania silnika w podwójnej roli zarówno napędu, jak i kompensatora mocy biernej powinna być przewidziana już na etapie projektowania przy doborze silnika synchronicznego i układu zasilania uzwojenia wzbudzenia.
Właściwy dobór silnika synchronicznego polega na wyznaczeniu jego mocy znamionowej Sv na podstawie zastępczej (średniej kwadratowej) mocy czynnej P,„- oraz mocy biernej 0, wynikającej z potrzeb kompensacji. Wówczas znamionowa moc silnika winna spełniać zależność
SK > y/Pl, + Qi (9.62)
Metoda powyższa jest nieprzydatna w warunkach zmiennych obciążeń biernych <2z;, które wymagają skompensowania w kolejnych latach eksploatacji (/ = 1,2,...). Zmiana wartości QZJ może wynikać, między innymi, z naturalnego wzrostu poboru energii, a także z modernizacji układów przetwarzania energii wskutek zwiększenia poboru energii biernej przy stałym lub mniejszym zużyciu energii czynnej.
Zmienność energii biernej wymagającej skompensowania w poszczególnych latach jest uwzględniona w metodzie opisanej w [9.22], [9.24]. Metoda ta polega na doborze silnika wg kryterium maksymalizacji zysku, dla którego podstawą jest wskaźnik ekonomicznej efektywności inwestycji Ff:. W każdym przypadku optymalna moc znamionowa silnika SjV „p, jest rozwiązaniem zadania
FE(SNoft) = maxFE(SN) (9.63)
Z rozwiązania tego zadania wynikają m.in. następujące wnioski:
optymalna moc znamionowa silnika praktycznie nie zależy od warunków ekonomicznych w danym roku (stopy dyskontowej, ceny energii biernej i czynnej itp.);
— o wyborze silnika decyduje przewidywany (założony) rozkład mocy biernej Qxj wymagającej skompensowania w kolejnych latach eksploatacji; moc optymalna SNopt może być w praktyce obliczona na podstawie obciążenia Pmz oraz wartości średniej mocy biernej w założonym okresie (m lat) eksploatacji.
Przy wykorzystywaniu silnika do nadążnej kompensacji mocy biernej, uzwojenie wzbudzenia powinno być zasilane z przekształtnika tyrystorowego — pelnosterowancgo układu mostkowego. Dobór parametrów wzbudnicy tyrystorowej sprowadza się do wyznaczenia wymaganego współczynnika forsowania napięcia wzbudzenia kv.
Najczęściej stosowaną metodą wyznaczania forsowania jest obliczanie wartości współczynnika kv na podstawie wymaganej szybkości zmian mocy biernej dQz/dt. Z równania (9.61) otrzymuje się
kf > «V»(2 —'/«) +
(9.64)
Powyższa metoda, jakkolwiek słuszna z technicznego punktu widzenia, prowadzi najczęściej do dużego przewymiarowania układu zasilania, zatem do dodatkowych, nieuzasadnionych kosztów inwestycyjnych.
Optymalną wartość współczynnika forsowania kUopl można wyznaczyć w sposób analogiczny jak przy doborze silnika, tj. maksymalizując wskaźnik ekonomicznej efektywności inwestycji FE, czyli
^uoPt) = max FE{kv) (9.65)
Metoda ta (dla pojedynczego silnika i grupy silników) jest opisana szczegółowo w [9.22]. Obliczona tą metodą wartość optymalna
ku oP, = 2 dla T0> T'd
ku „p, = 0,75 + 0,5-
T'd
dla T„ < Tj
(9.66)
gdzie T0 — czas występowania obciążenia maksymalnego QSo miu
9.2.4. Układy regulacji mocy biernej silników synchronicznych
Każdy silnik synchroniczny winien być wyposażony w indywidualny regulator RSS sterujący prądem wzbudzenia maszyny w sposób zapewniający równoczesną realizację funkcji napędowych i kompensacyjnych. Strukturę regulatora RSS przedstawiono na rys. 9.4.
W proporcjonalnym regulatorze RPWmaksymalne sygnały wyjściowe odpowiadają przyjętemu forsowaniu napięcia w obu kierunkach, tj. przy pracy prostownikowej i falownikowej.
W dowolnej chwili, zadawany prąd wzbudzenia /. przyjmuje wartość większą z dwóch sterowrań: vQ i vP. Sterowanie vQ decyduje o wartości prądu wzbudzenia ze względu na zadaną moc bierną Qz; sterowanie vp jest proporcjonalne do minimalnego prądu wzbudzenia Ifmi„ wynikającego z aktualnego obciążenia czynnego. Nastawy regulatora RSG (odcięcie i nachylenie charakterystyki) wynikają z aproksymacji zależności (9.53) i (9.54). W przypadku występowania sprzecznych celów sterowania, tzn. wymagających dowzbudzania silnika ze względu na moment obciążenia i odwzbudzania z powodu zadanej wartości Qz, układ U HśS zabezpiecza synchroniczną pracę maszyny z mocą bierną Qs, przy której występuje min (Qz—Qs)-
Na rysunku 9.5 przedstawiono strukturę regulacji mocy biernej wszystkimi silnikami synchronicznymi, zainstalowanymi w zakładowej sieci rozdzielczej.
Każdy silnik synchroniczny jest wyposażony w indywidualny regulator RSS o strukturze przedstawionej na rys. 9.4; każdej rozdzielni jest przyporządkowany oddzielny regulator RWE. Regulatory węzłów energetycznych są wzajemnie powiązane w sposób
Wyszukiwarka
Podobne podstrony:
2tom322 9. URZĄDZENIA DO KOMPENSACJI MOCY BIERNEJ 646 Rys. 9.4. Struktura regulatora RSS silnika syn
2tom326 9. URZĄDZENIA DO KOMPENSACJI MOCY BIERNEJ 654 Baterie na napięcie 6 i 10 kV mają zwykle jedn
2tom327 9. URZĄDZENIA DO KOMPENSACJI MOCY BIERNEJ 656 Regulator mocy biernej baterii kondensatorów s
2tom320 9. URZĄDZENIA DO KOMPENSACJI MOCY BIERNEJ 642 Zasilanie silnika przez dławik zwarciowy i spo
2tom323 9. URZĄDZENIA DO KOMPENSACJI MOCY BIERNEJ 6489.3.2. Przebiegi łączeniowe baterii samotnych i
2tom324 9. URZĄDZENIA DO KOMPENSACJI MOCY BIERNEJ 650 Jeśli natomiast warunki te nie są spełnione, t
2tom325 9. URZĄDZENIA DO KOMPENSACJI MOCY BIERNEJ 652 Moce baterii kondensatorów nn w procentach moc
2tom328 9. URZĄDZENIA DO KOMPENSACJI MOCY BIERNEJ 658 Moc bierna kompensatora przy podstawowej harmo
2tom329 9. URZĄDZENIA DO KOMPENSACJI MOCY BIERNEJ przez wartość amplitudową. Na rysunku 9.9 przedsta
2tom330 9. URZĄDZENIA DO KOMPENSACJI MOCY BIERNEJ 662 9. URZĄDZENIA DO KOMPENSACJI MOCY BIERNEJ 662
2tom335 9. URZĄDZENIA DO KOMPENSACJI MOCY BIERNEJ Rys. 9.19. Filtr aktywny jako inwcrtor napięcia -j
2tom333 9. URZĄDZENIA DO KOMPENSACJI MOCY BIERNEJ 668 taki układ nazywa się filtrem, a poszczególne
2tom315 Urządzenia do kompensacji mocy biernej doc. dr inż. Zbigniew Bialkiewicz (p. 9.3.9.4,9.6 — b
2tom316 9. URZĄDZENIA DO KOMPENSACJI MOCY BIERNEJ 634 Moce te mogą być reprezentowane geometrycznie
2tom317 9. URZĄDZENIA DO KOMPENSACJI MOCY BIERNEJ 636 Z zależności (9.27) wynika, że odbiornik jedno
2tom318 9. URZĄDZENIA DO KOMPENSACJI MOCY BIERNEJ 638 W energetyce współczynnik mocy w układach trój
2tom319 9. URZĄDZENIA DO KOMPENSACJI MOCY BIERNEJ 640 gdzie: = —-^(Gab+Gbc + Gca) tg<P„. V3 przy
2tom331 9. URZĄDZENIA DO KOMPENSACJI MOCY BIERNEJ 664 Susceptancje fazowe mogą być mierzone w każdej
2tom332 9. URZĄDZENIA DO KOMPENSACJI MOCY BIERNEJ 666 Ponieważ odkształcenie napięcia jest zwykle sp
więcej podobnych podstron