skanuj0002
4
• indukcja jest równa zeru nie u osi poprzecznej, lecz, w punkcie przesuniętym Jo niej o kąt u, czyli nlannctyc/na oś neutralna obraca się o kul a względem geometrycznej osi neuinilnej^
• u przypadku inas/yny nasyconej strumień ulem zmniejszeniu, co powoduje zmniejszenie sily elektromotorycznej indukowanej w tworniku maszyny prądu stałego. —

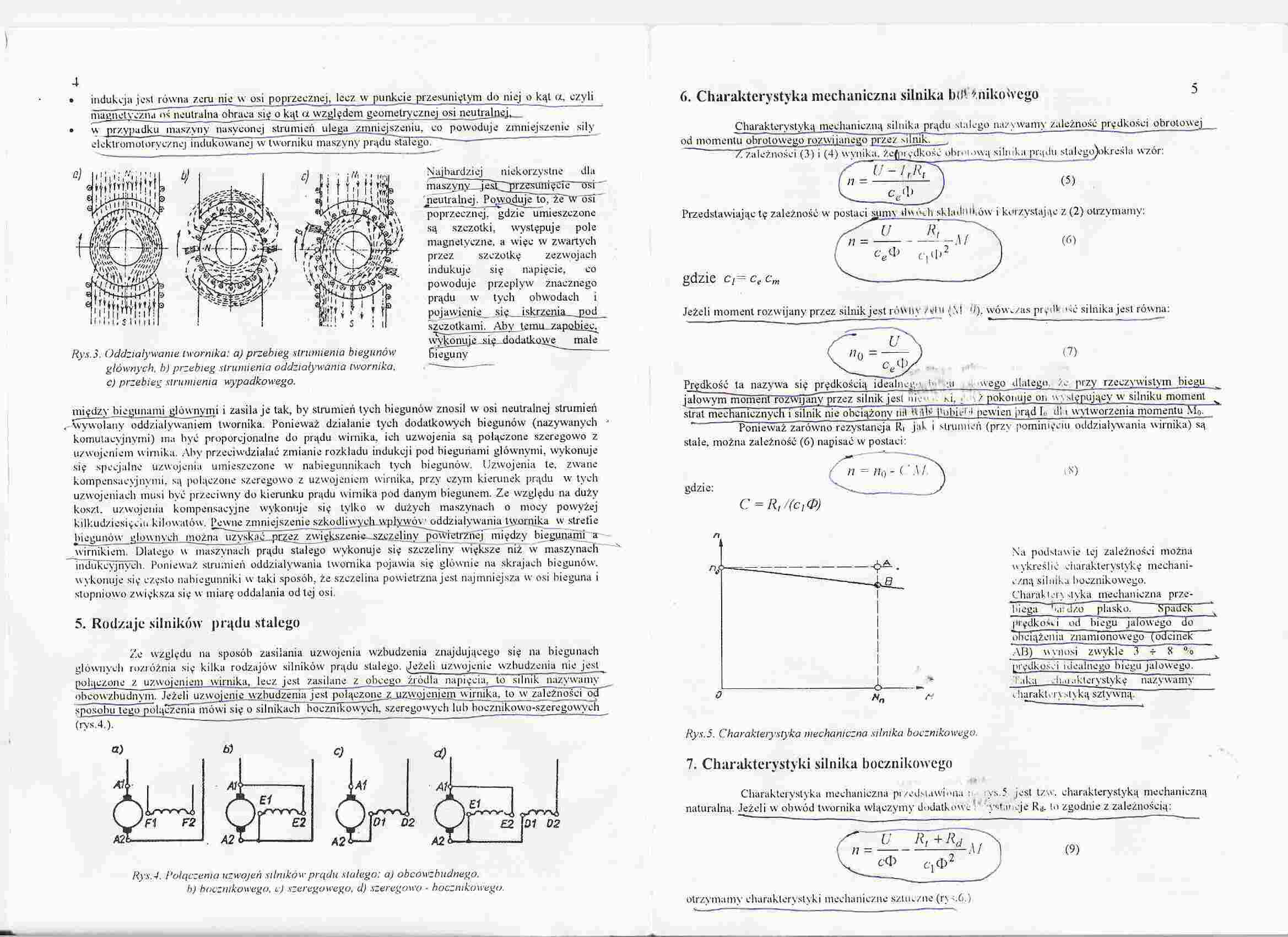
Rys.3. Oddziaływanie twornika: a) przebieg strumienia biegunów głównych, b) przebieg strumienia oddziaływania twornika. c) przebieg strumienia wypadkowego.
Najhardziej niekorzystne dla
maszyny_j esn7~przesuiityćTe osi'
neutralnej. Powoduje to, żITwóśi poprzecznej, gdzie umieszczone są szczotki, występuje pole magnetyczne, a więc w zwartych przez szczotkę zezwojach indukuje się napięcie, co powoduje przepływ Znacznego prądu w tych obwodach i pojawienie się _ iskrzenia pod szczotkami. Aby termi-zapobiec^ wykonuje oj ię. dodatkoy^e małe Bieguny między biegunami głów nymi i zasila je lak, by strumień tych biegunów znosił w osi neutralnej strumień 'wywołany oddziaływaniem twornika. Ponieważ działanie tych dodatkowych biegunów (nazywanych komutacyjnymi) ma być proporcjonalne do prądu wirnika, ich uzwojenia są połączone szeregowo z uzwojeniem wirnika. Aby przeciwdziałać zmianie rozkładu indukcji pod biegunami głównymi, wykonuje się specjalne uzwojenia umieszczone w nabiegunnikach tych biegunów. Uzwojenia le, zwane kompensacyjnymi, są połączone szeregowo z uzwojeniem wirnika, przy czym kierunek prądu w tych uzwojeniach musi być przeciwny do kierunku prądu wirnika pod danym biegunem. Ze względu na duży koszt, uzwojeniu kompensacyjne wykonuje się tylko w dużych maszynach o mocy powyżej kilkudziesięciu kilowatów. Pewne zmniejszenie szkodliwych wpływów oddziaływania twornika w stretie hictmnów cjou nvch można uzvskąć_ptzez^jWvięLszenjg~szcz.ę)iny powietrznej między biegunami a wirnikiem. Dlatego w maszynach prądu stałego wykonuje się szczeliny większe niż w maszynach indukcyjnych. Ponieważ strumień oddziaływania twornika pojawia się głównie na skrajach biegunów, w ykonuje się często nahiegunniki w taki sposób, że szczelina pow ietrzna jest najmniejsza w osi bieguna i stopniowo zwiększa się w miarę oddalania od tej osi.
5. Rodzaje silników |)n)du stałego
Ze względu na sposób zasilania uzwojenia wzbudzenia znajdującego się na biegunach głównych rozróżnia się kilka rodzajów silników prądu stałego, (Jeżeli uzwojenie wzbudzenia nie jest połączone z uzwojeniem wirnika, lecz jest zasilane z obcego źródła napięcia, to silnik nazywamy
obcowzbudnym. Jeżeli uzwojenie wzbudzenia jest połączone /. uzwojeniem wirnika, to w zależności oc sposobu ieKo połączenia mówi się o silnikach bocznikowych, szeregowych lub bocznikowi)-szeregowyeh (rys.4.). -
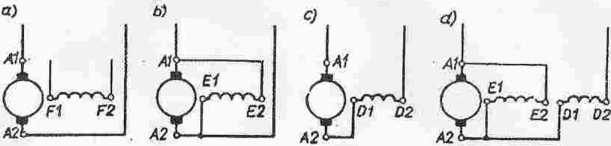
Rys.-I. Połączenia uzwojeń silników prądu stałego: aj obcowzbudnego.
h) bocznikowego, l) szeregowego, d) szeregowo ■ bocznikowego
6. Charakterystyka mechaniczna silnika b(JV*.nik()'vego 5
Charakterystyką mechaniczną silnika prądu stałego mi/swamy zależność prędkości obrotowej_
od momentu obrotowego rozwijanego prze? silnik! ’
"^Zależności (3) i (4) wynika. żcfpiydkość obf. i->wą silu k.i prądu sUilego^określa wzór:
U-l,Rt ,
-) (5)
cjb
Przedstawiając tę zależność w postaci spm\ dwćJi sklndnb.ów i korzystając z (2) otrzymamy:


(6)
Rt
r,tp
gdzie C(=ct c„
Jeżeli moment rozwijany przez silnik jest równy / vn i (M <I). wówczas prę 4 >śe silnika jest równa:

(7)
Prędkość ta nazywa się prędkością idealnego '■ -.u wego dlatego, żc przy rzeczywistym biegu
jałowym moment rozwijany przez silnik jest ni m, : z pokonuje on w. stępujący w silniku moment strat mechanicznych i silnik nie obciążony ud H ąb Pubie1 ■* pew ien prąd 1, rl! i wytworzenia momentu Mn.
Ponieważ zarówno rezystancja Ri jat i tlruimcń (przs pominięciu oddziaływania wirnika) są stale, można zależność (6) napisać w postaci:
gdzie:
N)

Na podstawie tej zależności można wykreślić charakterystykę mechaniczną silnika bocznikowego.
Cl ni rai' t ci \ 'l yka mechaiiicz.ua przebiega "'-.rdzo płasko. ~ Spadek piędkosu od biegu jałowego do obciążenia znamionowego (odcinek AB) wynosi zwykle 3 -f- Ś °o prędkości idealnego biegu jałowego. I nka ■■•b.n.ikl eryslykę liazy w a m y charaktery .-tyką sztywną
Rys.5. Charakterystyka mechaniczna silnika bocznikowemu
7. Charakterystyki silnika bocznikowego
Charakterystyka mechaniczna pivc-dM.i\vi.*n.» : yv5 jest l/w. charakterystyką mechaniczną naturalną. Jeżeli w obwód twornika włączymy dodatków.. yM.incje Rd- to zgodnie z zależnością:
|
U |
R'i + &d , , |
|
cd> |
e,®* |
otrzymamy charakterystyki mechaniczno szitn/ne (ry
(9)
Wyszukiwarka
Podobne podstrony:
1 GR 1. 1 prawo Netwona (I) Ciało, na które nie działa żadna siła (lub gdy siła wypadkowa jest równa
skanuj0005 Równowaga trwała występuje w punkcie x0gdyż nachylenie krzywej jest zerowe, wobec czego s
250 Hubert L. Oczkowski scencji (zwana resztkową) jest równa zeru. Dodatkowe badania struktury ceram
42060 P1020492 Pole jest potencjalne, jeżeli jego rotacja jest równa zeru -T* l J k d dx
323 (14) 646 25. Obwody nieliniowe prądu okresowego przewodzenia jest równa zeru, natomiast rezystan
334 (30) 334 10. Dynamika punktu początkowej jest równa zeru (vo = 0). Praca siły F będ^ równa PRZYK
Stan rezonansu występuje wtedy, gdy reaktancja indukcyjna jest równa reaktancji pojemnościowej. Napi
Reguły deltaPrzykład: test na zero W wielu funkcjach konieczne jest sprawdzenie, czy liczba jest rów
P1020479 zatemW: W chwili oderwania się punktu materialnego od powierzchni walcowej jej reakcja N je
12985 P1020479 zatemW: W chwili oderwania się punktu materialnego od powierzchni walcowej jej reakcj
36 2. Zmienne losowe Ponieważ skok w zerze F(0+) - F(0) = 1/2, a całka w przedziale (-00,0) jest rów
397 S 2. Funkcje uwikłane 2) w punkcie tym funkcja F(x, y) jest równa zeru: F{x0, yo)=0; 3)
więcej podobnych podstron