P1080319
9. Układy sensoryczne
9.4.2. Przetworniki siły i naprężeń
Wyposażenie chwytaka w przetworniki siły i naprężeń jest ważne z następują-1 cych powodów:
1. Umożliwiają one określenie interakcji między przedmiotem manipulo- l wanym a chwytakiem. Jest to konieczne np. do sterowania maksymalną siłą chwytaka w celu niedopuszczenia do uszkodzenia manipulowanego przedmiotu lub określenia interakcji między manipulowanym przedmiotem a innymi elementami otoczenia. Jest to sytuacja charakterystyczna dla operacji montażu, w których I jedna część składowa wyrobu (przedmiot manipulowany) jest wsuwana w otwór innej części wyrobu. Przykładem może być wsuwanie trzpienia w otwór. Znajo-J mość naprężeń powstających podczas takiej operacji w chwytaku manipulatora przyspiesza znacznie jej realizowanie, nawet jeśli są małe luzy pasowania.
2. Przetworniki sił umożliwiają wyznaczenie niektórych współrzędnych charakteryzujących orientację przedmiotu, np. wyznaczenie kierunku normal-l nego do badanej powierzchni przedmiotu.
3. W przypadku teleoperatorów sterowanych przez człowieka sprzężenie* zwrotne od siły chwytu umożliwia człowiekowi bardziej precyzyjne manipuluj wanie.
Przetworniki siły są drugimi w kolejności, po układach pomiaru położenia! (przemieszczenia), przetwornikami stosowanymi w robotach. Przyczynia się doi tego również łatwość adaptowania znanych przetworników sił i naprężeń do I zastosowań w robotach. Należy tu wymienić:
- przetworniki tensometryczne rezystancyjne, w których wykorzystuje się efekt zmiany rezystancji przetwornika metalowego poddanego naprężeniu mechanicznemu; przetwornik ten składa się z drutów tensome-trycznych wklejonych między dwie warstwy papieru lub folii, przyklejenie przetwornika na powierzchni obciążanego elementu sprawia, że naprężenie wywołane siłą obciążającą przenosi się na drut tensonie-tryczny-iys. 9.16,
- przetworniki zmieniające siłą na przesunięcie mechaniczne, np. mieszki sprężyste,
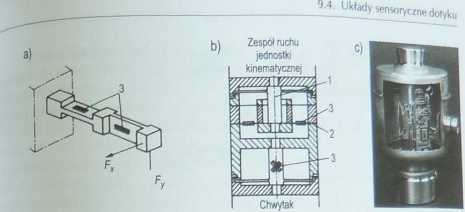
Rysunek 9.16^__
Budowa tensometrycznych czujników sił i momentów: a) w układzie współrzędnych prostokątnych, b) o konstrukcji tulejowo-membranowej; 1 - cienkościenna tuleja, 2 - membrana, 3 -tensometry, ć) widok [94]
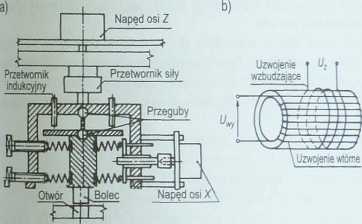
Rysunek 9.1;^_
Chwytak^magnetoelektrycznym przetwornikiem siły w osi pionowej: a) konstrukcja chwytaka, b) przetwornik magnetoelektryczny [91]
- przetworniki rftagnetoelektryczne, w których wykorzystuje się efekt zmiany kierunku wektorów magnetyzacji pod wpływem naprężeń oddziałujących na ferromagnetyk w formie walca, w wyniku czego zmienia sięjSprzężenie magnetyczne między uzwojeniami wtórnym a pierwotnym, nawiniętymi na walec - rys. 9.17.
•4.3. Przetworniki dotykowe typu „sztuczna skóra"
teJ
tysunku 9.18 pokazano budowę pneumatycznej „sztucznej skóry”. Podsta-Wovvym jej elementem jest matryca mikrokopul wykonana z cienkiej membrany płowej. Mikrokopuły są. sprężyste, przy czym każda z nich ma dwa stabilne °żenia równowagi:
" położenie wypukłe (na zewnątrz), jeżeli nie działają na nią żadne siły zewnętrzne, oprócz ciśnienia powietrza zasilającego, 285
Wyszukiwarka
Podobne podstrony:
P1080327 9. Układy sensoryczne b) Przetwornik Dyskryminator fotooptyczny fezy Rysu
P1080324 9. Układy sensoryczne - odległości między charakterystycznymi punktami ob
67726 P1080325 9. Układy sensoryczne ruchu ramienia robota przy różnych jego ustawieniach. Kalibracj
więcej podobnych podstron