instalacje098
3. STEROWANIE SILNIKÓW SKOKOWYCH 78
wartość maksymalną, to wyłącznik W (rys. 3.9b) zostanie otwarty i obwód uzwojenia silnika skokowego przerwany. Przez diodę D prąd będzie się rozładowywał tak długo, aż osiągnie swoją wartość minimalną, co spowoduje zamknięcie wyłącznika W. Wartość chwilowa prądu waha się z częstotliwością przerywania wokół określonej wartości średniej (rys. 3.9d).
Przy ograniczaniu rezystorowym można stosować kondensator równolegle z rezystorem Rs (rys. 3.9c). Wtedy krzywa momentu w funkcji częstotliwości ma przebieg jak 5 na rys. 3.5.
Sterowanie z rezystorem ograniczającym jest prostą i tanią metodą ograniczania czasu narastania prądu, której wadą jest mała sprawność, w związku z dużymi stratami mocy w rezystorze ograniczającym Rs. Ponadto można go stosować przy nie bardzo dużych częstotliwościach — — ze względu na niezbyt dużą prędkość narastania prądu.
Korzystniejsza jest metoda z rezystorem Rs i dodatkowym kondensatorem C. Niedrogi kondensator elektrolityczny zapewnia wzrost momentu obrotowego. Na przykład według publikacji [43] kondensator o pojemności C = 500 pF, połączony równolegle z każdym rezystorem, zapewnia w przybliżeniu podwojenie momentu w zakresie 500-rl00 im-pulsów/s.
Układ z przerywaczem elektronicznym ma dużą sprawność. Prąd może być regulowany niezależnie od napięcia zasilającego. Z uwagi na bardzo szybkie zmiany prądu, możliwe jest uzyskanie bardzo dużych częstotliwości. Sposób ten jest jednak bardzo kosztowny.
3.4. Kierunki rozwoju układów sterowania silników skokowych
3.4.1. Ulepszanie klasycznych układów sterowania
Klasyczne układy sterowania silników skokowych są opisane w literaturze technicznej dostępnej w Polsce, jednak stale są udoskonalane ze względu na znaczny postęp w dziedzinie elektroniki. Ich ulepszanie polega głównie na dążeniu do zwiększenia skali integracji [49; 60], Realizuje się specjalne układy do sterowania przy pracy miniskokowej (ang. wini stepping) [40; 46; 51; 58; 63], a także układy sterowania silników skokowych z zastosowaniem mikroprocesorów [44; 47; 61]. Prowadzone są też prace nad ulepszeniem charakterystyk dynamicznych i zwiększeniem sprawności silników skokowych przez zasilanie ich uzwojeń prądem o przebiegu sinusoidalnym — zamiast impulsów prostokątnych [41].
Podstawowym rodzajem układu sterowania silnika skokowego jest układ impulsowy, w którym informacja jest zadana w postaci ciągu impulsów, a następnie rozprowadzona do poszczególnych pasm uzwojenia silnika. Uproszczony schemat blokowy układu sterowania silnika skokowego został przedstawiony na rys. 1.1. Jego głównymi elementami są: źródło impulsów, układ logiczny, wzmacniacz (stopień końcowy mocy) i zasilacz prądu stałego.
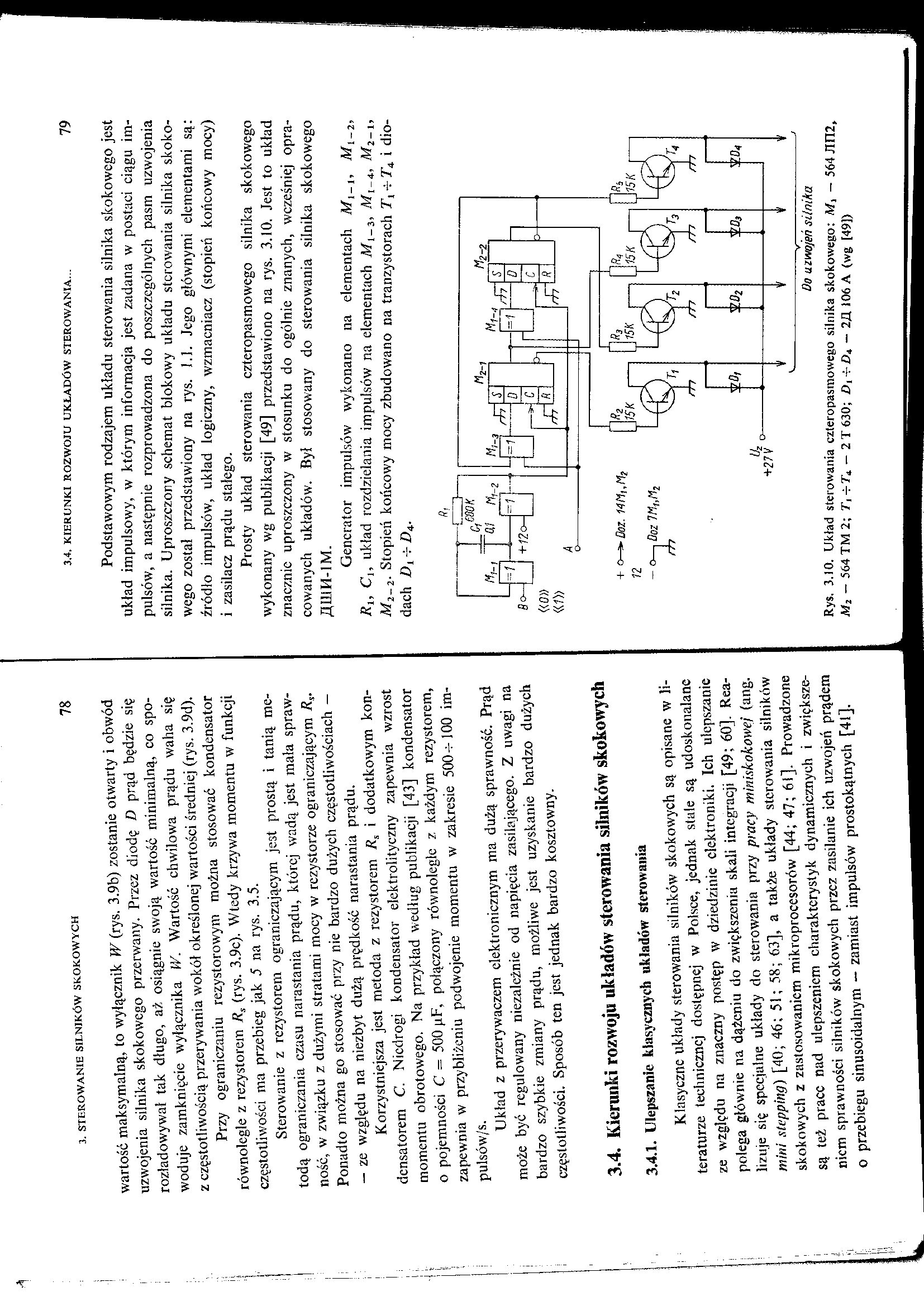
Prosty układ sterowania czteropasmowego silnika skokowego wykonany wg publikacji [49] przedstawiono na rys. 3.10. Jest to układ znacznie uproszczony w stosunku do ogólnie znanych, wcześniej opracowanych układów. Był stosowany do sterowania silnika skokowego
AIUM-IM.
Generator impulsów wykonano na elementach M,_j, 1V/1_2> Rly Cj, układ rozdzielania impulsów na elementach A/j_4, M2~ly
M2-2‘ Stopień końcowy mocy zbudowano na tranzystorach Tx TA i diodach Di%-D4.
R,
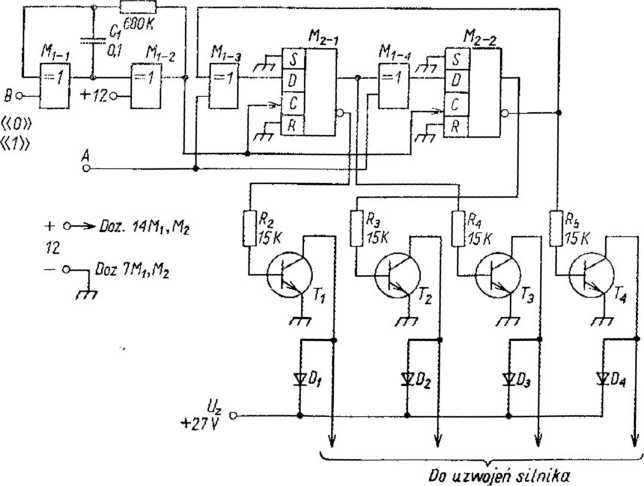
Rys. 3.10. Układ sterowania czteropasmowego silnika skokowego: — 564 31112,
M2 - 564 TM 2; T, +TA - 2 T 630; Z), ~£>4 — 2JX 106 A (wg [49])
Wyszukiwarka
Podobne podstrony:
instalacje094 X STEROWANIE SILNIKÓW SKOKOWYCH 70 Rys. 3.2. Komutacja symetryczna silnika skokowego:
instalacje102 3. STEROWANIE SILNIKÓW SKOKOWYCH 85 mable Read Only Memory). Na wyjściu układu PROM je
instalacje093 3. Sterowanie silników skokowych3.1. Komutacja symetryczna i niesymetryczna silnika sk
instalacje096 3. STEROWANIE SILNIKÓW SKOKOWYCH 74 kiem rezonansu, który występuje przy określonej cz
instalacje103 3. STEROWANIE SILNIKÓW SKOKOWYCH 88 Rys. 3.17. Mikroprocesorowy układ sterowania silni
65281 instalacje097 3. STEROWANIE SILNIKÓW SKOKOWYCH 76 >
75846 instalacje100 3. STEROWANIE SILNIKÓW SKOKOWYCH 82 58; 63]. Idea sterowania miniskokowego powst
instalacje115 4. TEORIA SILNIKÓW SKOKOWYCH 112 Moc maksymalna występuje kiedy /? = 0, punktem pracy
więcej podobnych podstron