IMG146
przez odpowiednie urządzenia oddzielające i następnie przcmies prowadnicach: 2, 3 i 6. Płytka 8 urządzenia montażowego ma dwa sześciokątne 9 i okrągłe 5, które są przystosowane do wymiarów i krążka 4. Sworze ń 12 (połączony z płytą 8) przemieszcza się w | tażu zespołu w tulejce 11 pod wpływem wirowego przepływu spję^6"... wietrzą dostarczanego do przewodu 10. 8°^
Kolejno podawane przez zasobniki: nakrętka 1 i krążek 4, przen^ się po prowadnicach 2 i 3 i wpadają do gniazd 9 i 5. Następnie |U7% wpada do otworu krążka 4 i jest wkręcana przez klucz (nie pokazany***? sunku) w nakrętkę 1.
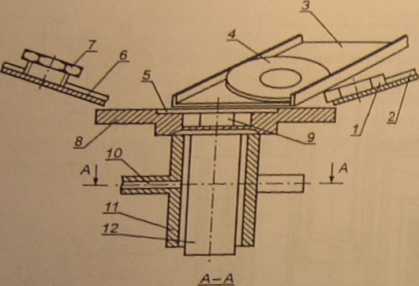
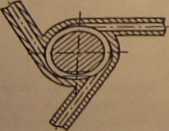
Rys. 2.69. Schemat działania pneumatycznego urządzenia do wzajemnej orientacji trud I
przedmiotów [12]
Na rysunku 2.70 pokazano schemat działania urządzenia do automatycznego montażu z grupową orientacją pneumatyczną nakrętek i wzajemną orientt-cją montowanych przedmiotów.

Orientowane grupowo nakrętki 1 są podawane z zasobnika wibracyjnego na górną powierzchnię tulei 5. Tuleja 5 umieszczona jest z luzem w oprawce złożonej z dwóch części: tulei orientującej 2 i podstawy 4. Podstawa 4 ma w j górnej powierzchni wykonane spiralne rowki 3, przez które wynteaMBs^one ■ powietrze (wprawiane przez nie w ruch wirowy). Pod wi^dj wego sprężonego powietrza tuleja 5 wprawiana jest ww
cłrfnie cyklicznie przemieszcza się poprzecznie wzdłuż osi xy. Pod wpływem łych mchów, nakrętki 1 rozprowadzane są po powierzchni czołowej tulei 5 i wprowadzane są do orientujących gniazd wykonanych w tulei orientującej 2. po zakończeniu grupowej orientacji nakrętek 1, podawane są przez manipulatory (ewentualnie robot): płytka 7 i pokrywa 8, a następnie komplet śrub 6. Śmby 6 wkręcane są przez automatyczny wkrętak 9. W czasie wkręcania (rab, tulejka 5 powtórnie jest wprawiana w ruch złożony przez wirowy przepływ sprężonego powietrza. Powoduje to wzajemną orientację nakrętek l, płytki 7, pokrywki 8 i śrub 6. Po montażu zmontowany zespół wyjmowany jest przez manipulator (robot) z tulei orientującej 2.
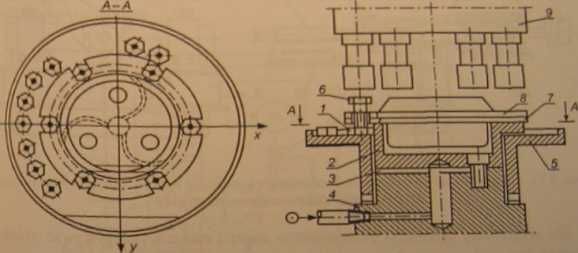
Rys. 2.70. Schemat działania urządzenia do automatycznego montażu z grupowym orientowaniem nakrętek i wzajemnym orientowaniem przedmiotów [12]
Do wzajemnej orientacji przedmiotów metodą elektromagnetyczną wykorzystuje się:
- stałe i pulsujące pola elektromagnetyczne wytwarzane przez elektromagnesy,
- wirujące pola elektromagnetyczne (wytwarzane jak w silnikach asynchronicznych prądu zmiennego).
Na rysunku 2.71 pokazano urządzenie do montażu wałka 5 z tuleją 3. Nagrzana tuleja 3 podawana jest na pryzmę 7 ustalającą jej położenie i za pomocą popychacza 1 zaciskana jest między tuleją 2 a pierścieniem 4. Pod działaniem pola magnetycznego wytwarzanego przez elektromagnes 8 i magneto-wody 6, wałek S (położony na podstawce pryzmatycznej 9) wciągany jest do otworu tulei 3 — aż do momentu zetknięcia się z regulowanym oporem 11 W trakcie osiowego przemieszczania się wałka 5 jest on wprawiany w ruchy oscylacyjne przez pole magnetyczne wywarzane przez cewkę 10. W wyniku działania '••"óch pół magnetycznych następuje wzajemna orientacja wałka 5 i tulei 2 . montaż.
19
■i
175
Wyszukiwarka
Podobne podstrony:
img146 146 Dzięki urządzeniom pryzmatycznym i obserwowaniu końców pęcherzyka przez lupę iibsla niwel
str11 (21) rowanie zespołu prowadnic na cel odbywało się przez odpowiednie ustawienie wozu boiowego,
29 (579) Rozlew piwa do puszek ma następujący przebieg: Puszki po umyciu, są kierowane przez odpowie
szkolenia niezbędne do zaspokojenia tych potrzeb, prowadzone przez odpowiednie osoby, zaś na końcu d
skan0117 228 A. FULIŃSKI nyra kierunku) są następnie wychwytywane przez odpowiednie liczniki. Aby ot
decyzję. Kontrola następcza prowadzona przez federalną izbę obrachunkową może być prowadzona na miej
skanuj0063 (18) 128 EUDAJMONOLOGIA CZYLI NAUKA O ( HU I SZCZĘŚCIU CZLOWI . . nostkę (hcdonizm). bądź
Zdj?cia 0008 iVmecnow v fi Ich celem bvło oddzielenie, a następnie fc>ar.)f< ie zalęgającej wy
więcej podobnych podstron