img179
179
179
(113)
flyeokość punktu C obliczamy dwukrotnie ®c c ha + Ła *
< = % ♦ i* ♦ H
1 przyjmujemy wartość średnią,
Zamiast sposobu przedstawionego na rysunku 190, możno również stosować prr-ostrzenne wcięcie w przód z ustalonej dowolnie bazy AB.
4.3. TaCHIIaSTRIś 4,3*1* Zasady ogólna
Metoda pomiarów tachimefcrycżsych polega ca szybkim określaniu wysokości i sytuacji punktów terenu (tcchinietria - szybki pomiar),
W celu przedstawienia zasady pomiaru tacbimetrycznego rozpatrzmy określenie położenia punktu w trójwymiarowym układzie za pcaocu .'/spólrzęd-nych biegunowych (rys* 191)* Nałóżmy, ż« w trójwy.aiur o wyxa układzie oś CZ jest skierowana do góry i pokrywa się z kierunkiem pienu, wówczas płaszczyzna Oxy zajmie położenie poziome* Aby w takim układzie wyznaczyć peło-
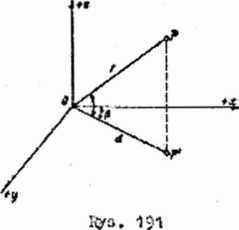
■żenig dowolnego punktu P v; przestrzeni, .wystarczy pomierzyćt 1) kąt poziomy £ , zawarty pomiędzy płaszczyzny pionową przechodzącą przez oś x i płaszczyznę pionową przechodzącą prnez punkt 2) kąt poc ty lenia ot, jaki Worzy prostu PO z płaszczyzną p ozimą Gacy, 3) odległość v punktu P od początku układu. Odległość tę itay.yw5i-T:y promieniem wodzącym. Trzy liczby (a, /ł, r) nazywamy współrzęd-nysi b ic gn nowyn i.
Pomiarzcne trzy wielkości pozwolą cc- • liczyć rzut CP' = d odcinka CP na plr.&?. =zy?.r.ę poziomą Cjqy i cdl*^łość t. = i3?' punktu P ca tej płaszczyzny'. Ewie liczby (/)> d) są współrzędnymi biegunowymi punktu P' na poziomej $>łaszcsyżnJe , a trzecia ii-jsba (z) okrcśl>i położenie (wysokość) punktu i1 azolędsm poziomej płaszczyzny od-nie aionia,
S 02aSle pomiarów toćhimetrycsnych mierzymy bezpośrednio, za pomocą teodolitu (tachistótru) dsu kąty ot i $ , a trzecią wielkość r wyznaczamy sh pomocą urządzenia dalmierze go znajdującego się v; lunecie.
Kąt ct jest kątem pionowym dioraorsya do punktu P ze stanowiska t.ichins-trycznego, zaś kąt 0 jest kątem kiorunkov;yŁ'. do punktu P określanym w te-
Wyszukiwarka
Podobne podstrony:
img179 179 179 (113) flyeokość punktu C obliczamy dwukrotnie ®c c ha + Ła *< = % ♦ i* ♦ H 1 przyj
img179 179 179 (113) flyeokość punktu C obliczamy dwukrotnie ®c c ha + Ła *< = % ♦ i* ♦ H 1 przyj
img179 (9) 179 179 (113) flyeokoóć punktu C obliczamy dwukrotnie = HA ♦ ia ♦ h„< = % ♦ ął “d i pr
12279 img179 (9) 179 179 (113) flyeokoóć punktu C obliczamy dwukrotnie = HA ♦ ia ♦ h„< = % ♦ ął “
12279 img179 (9) 179 179 (113) flyeokoóć punktu C obliczamy dwukrotnie = HA ♦ ia ♦ h„< = % ♦ ął “
img179 (9) 179 179 (113) flyeokoóć punktu C obliczamy dwukrotnie = HA ♦ ia ♦ h„< = % ♦ ął “d i pr
img179 179 12.2. Parsing dla gramatyki grafowej klasy ETL(l) conid(G, H, i) - boolowska funkcja spra
img179 179 179 By*. 115. Wirnik wentylator* Prryroat ciśnienia gazu w wentylatorze określa
img179 179 zakodowanym różnicowo poszczególnych sygnałów elementowych, p1 = p? = 0,5. pozwala nam to
img179 179 12.2. Parsing dla gramatyki grafowej klasy ETL(l) conid(G, H, i) - boolowska funkcja spra
img179 179 179 By*. 115. Wirnik wentylator* Prryroat ciśnienia gazu w wentylatorze określa
img179 179 zakodowanym różnicowo poszczególnych sygnałów elementowych, p1 = p? = 0,5. pozwala nam to
s 178 178 7. Ruch płaski stąd Wartość przyspieszenia punktu M obliczymy, składając zaznaczone wektor
s 178 178 7. Ruch płaski stąd Wartość przyspieszenia punktu M obliczymy, składając zaznaczone wektor
WYZNACZENIE WSPÓŁRZĘDNYCH PUNKTU P - OBLICZENIA Dane: Pomierzone: A (5405017,38; 4555200,39) B
OfcU:zer»a kontrolno W3pÓ!f7^<JO« Numer punktu Obliczenia pomocnej©
skan0110 Zadania 113 3e:26. Obliczyć entropię standardową, S°, 1 mola lodu w temperaturze 260 K, wie
więcej podobnych podstron