2011 12 19#;03;25
'bićopii ^ ĄfiS
Podstawy automatyki
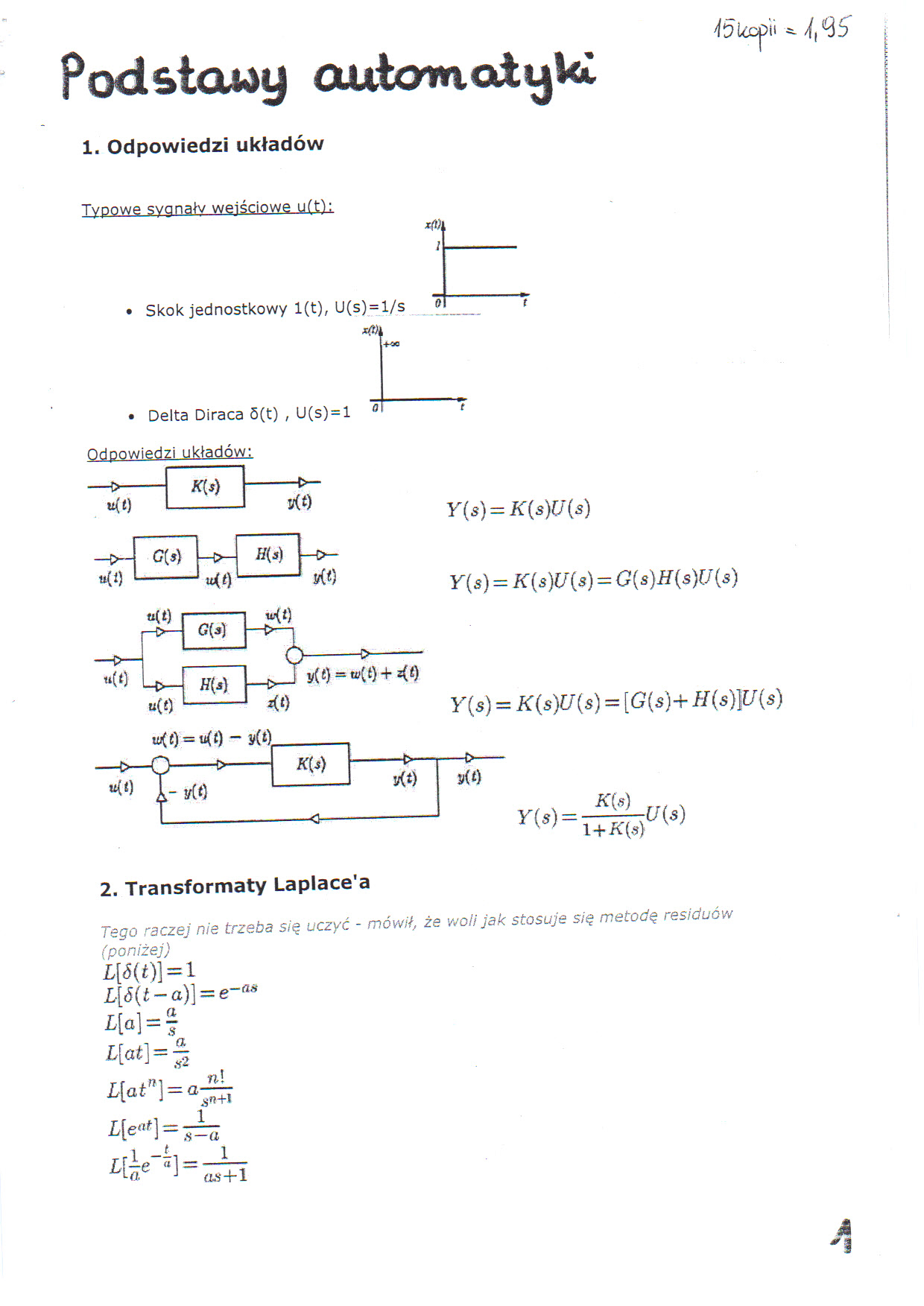
1. Odpowiedzi układów
Typowe svanałv wejściowe uft):
*fW
i
• Skok jednostkowy l(t), U(s) = l/s 0
x<l)i
• Delta Diraca 5(t) , U(s) = l 0
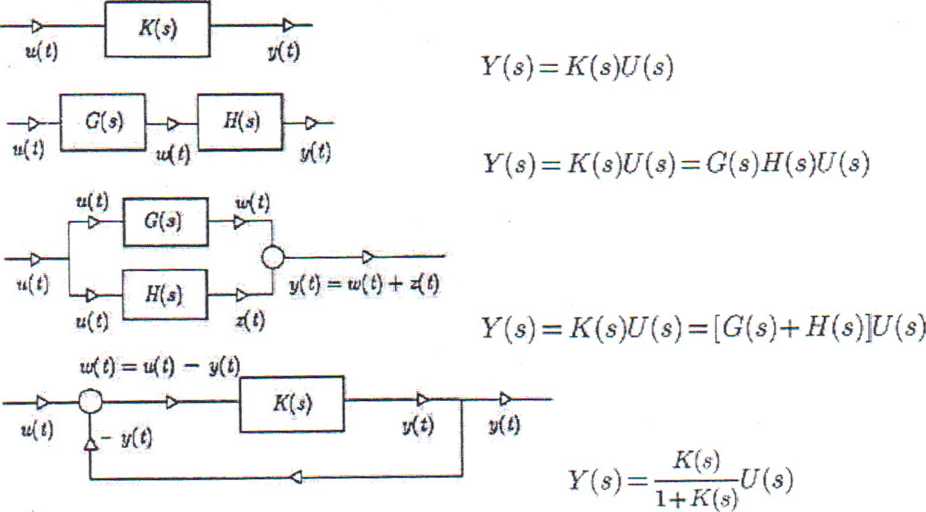
Odpowiedzi układów:
2. Transformaty Laplace'a
Tego raczej nie trzeba się uczyć -(poniżej)
mówił, że 'woli jak stosuje się metodę residuów
£[<5(01 = 1
L[<5(t-a)] = e_'“
£[«*] = ;§
n\
= a
1
fctó-f-1
1
,s—u
'§
Wyszukiwarka
Podobne podstrony:
2011 12 19#;03;2547 6) Lm{a)) * ^ [dB] 1 1 i _ > , i Mli t —r i jiiij J Lr l i i ii i
2011 12 19#;03;255 Lm{a>) Ł Rys. Charakterystyki logarytmiczne i i L J...... i
2011 12 19#;03;257 8. Wskaźniki odpowiedzi skokowej • czas regulacji (ustalenia) t
2011 12 19#;03;252 Jednakże przy biegunach zespolonych obliczenie residuum jest procesem złożonym i
2011 12 19#;03;2542 Przenoszenie węzła sumacyjnego z wejścia na wyjście Przenoszenie węzła sumacyjne
2011 12 19#;03;2545 7) Element różniczkujący idalny G(s) = krs G(juj) = krujeJż L-m(w) = ,2Qlogkl. +
2011 12 19#;03;255 Lm{a>) Ł Rys. Charakterystyki logarytmiczne 1 1 L
2011 12 19#;03;258 Przenoszenie węzła zaczepowego z wejścia na wyjście Przenoszenie węzła zaczepoweg
więcej podobnych podstron