59286 Slajd70 (12)
AUTONOMICZNE ROBOTY MOBILNE - sensoryka i sterowanie -> nawigacja
P rowa dze n i e wewn etrz n e:
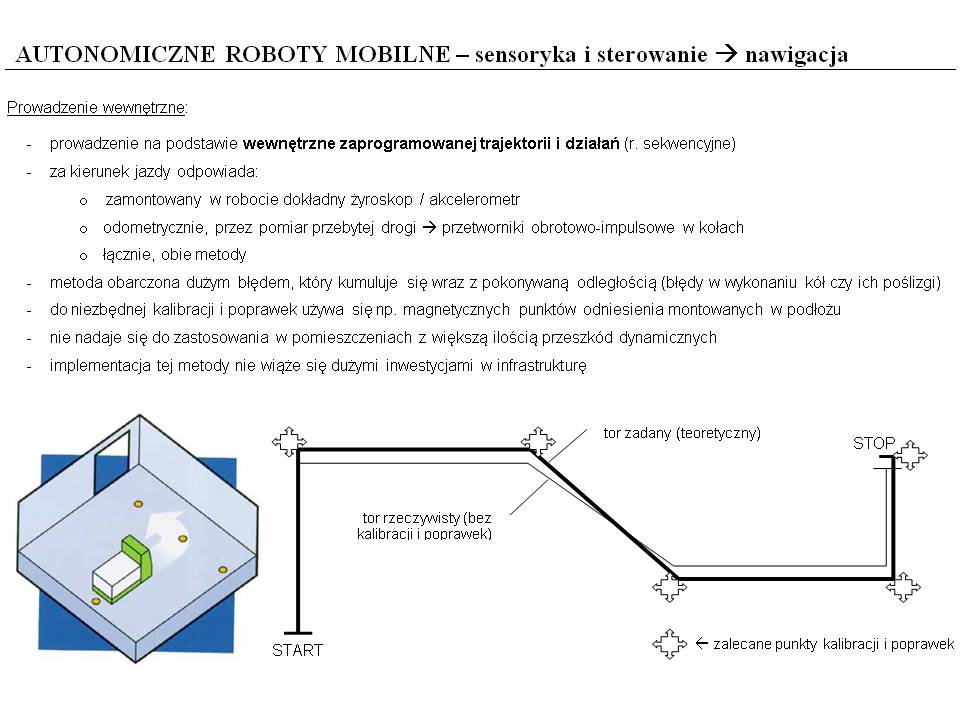
- prowadzenie na podstawie wewnętrzne zaprogramowanej trajektorii i działań (r. sekwencyjne)
- za kierunek jazdy odpowiada:
o zamontowany w robocie dokładny żyroskop / akcelerometr
o odometrycznie, przez pomiar przebytej drogi -> przetworniki obrotowo-impulsowe w kołach o łącznie, obie metody
- metoda obarczona dużym błędem, który kumuluje się wraz z pokonywaną odległością (błędy w wykonaniu kół czy ich poślizgi)
- do niezbędnej kalibracji i poprawek używa sięnp. magnetycznych punktów odniesienia montowanych w podłożu
- nie nadaje się do zastosowania w pomieszczeniach z większą ilością przeszkód dynamicznych
- implementacja tej metody nie wiąże się dużymi inwestycjami w infrastrukturę
START
tor zadany (teoretyczny)
tor rzeczywisty (bez kalibracji i poprawek)

A- zalecane punkty kalibracji i poprawek
Wyszukiwarka
Podobne podstrony:
Slajd71 (12) AUTONOMICZNE ROBOTY MOBILNE - sensoryka i sterowanie -> nawigacja Prowadzenie wewnęt
Slajd73 (12) AUTONOMICZNE ROBOTY MOBILNE - sensoryka i sterowanie nawigacja Prowadzenie nawigacyjne
74767 Slajd72 (12) AUTONOMICZNE ROBOTY MOBILNE - sensoryka i sterowanie -> nawigacja Drwing Oirec
70014 Slajd74 (10) AUTONOMICZNE ROBOTY MOBILNE - sensoryka i sterowanie nawigacja Prowadzenie lasero
Slajd65 (12) AUTONOMICZNE ROBOTY MOBILNE - sensoryka i sterowanie -> czujniki Czujniki mi kro sty
Slajd75 (9) AUTONOMICZNE ROBOTY MOBILNE - sensoryka i sterowanie -> nawigacja Prowadzenie laserow
Slajd61 (12) AUTONOMICZNE ROBOTY MOBILNE - sensoryka i sterowanie Napęd i zasilanie: - &
więcej podobnych podstron