64265 Slajd18 (18)
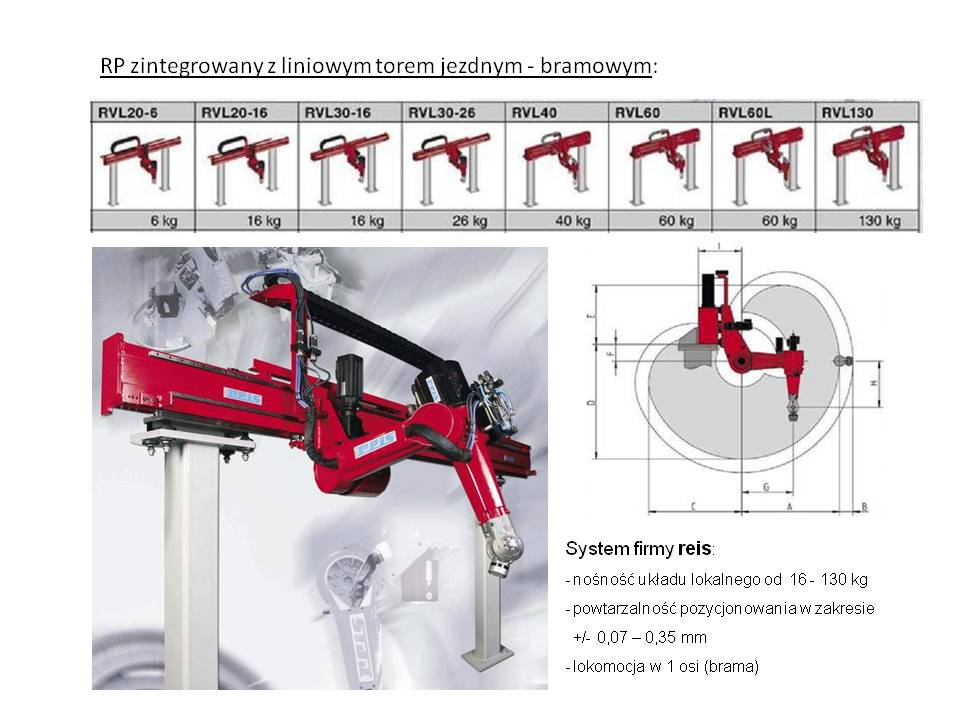
RP zintegrowanyz liniowym torem jezdnym - bramowym:
|
RVL20-6 |
RVL20-16 F |
tVL30-16 |
RVL30-26 F |
1VL40 R |
VL60 |
RVL60L |
f |
WL130 | ||
|
r |
fr 1 JL |
l ■ |
r <0 * X |
m • i |
ft |
ff * > | ||||
|
_«Jsl |
16 kg |
_l®iaL |
26 kg |
_fOJSL |
60 Kg . |
60 k |
SL _ |
130 kg | ||

System firmy reis:
- n ośn ość u kładu lokalnego od 16 - 130 kg
- powtarzaln ość pozycjon owan ia w zakresie +/- 0,07 - 0,35 mm
-lokomocja w 1 osi (brama)
Wyszukiwarka
Podobne podstrony:
60910 Slajd19 (18) RP robot modułowy z elementami jezdnymi:System modułowy firmy OTC: ♦
Slajd11 (18) RP + liniowytor jezdny: mon olityczn e lu b o bu dowie modułowej, efektywn y zasi ęg ru
20647 Slajd14 (18) RP + złożona lokomocja 2D/3D: 3D- 3 osie postępowe na bazietoru
Slajd16 (18) RP + złożona lokomocja 2D/3D...cd 3D- 3 osie postępowe w układzie suwnicowym (dwustronn
17865 Slajd17 (18) RP + automatyczna platforma szynowa:Robot obsługowo-transportowy ROMEO: -łącznie
Slajd15 (18) RP + złożona lokomocja 2D/3D...cd: 3D- 3 osie postępowe na bazie toru podwieszanego -
więcej podobnych podstron