41895 P1080251
5. Sterowanie robotów przemysłowych
W metodzie fotooptycznej są stosowane fotokomórki lub fotodiody umieszczone w mechanizmie koła kierunku jazdy (koła skrętnego), reagujące na natężenie światła odbitego od namalowanej linii. Układ regulacji kierunku jazdy dąży do tego, aby natężenie oświetlenia obu fotodiod było zawsze jednakowe, co oznacza prowadzenie wózka wzdłuż namalowanej linii.
W metodzie wykorzystującej detekcją metalu pojazd jest wyposażony w detektory metalu i podąża za stalową taśmą ułożoną na podłodze lub pod podłogą hali.
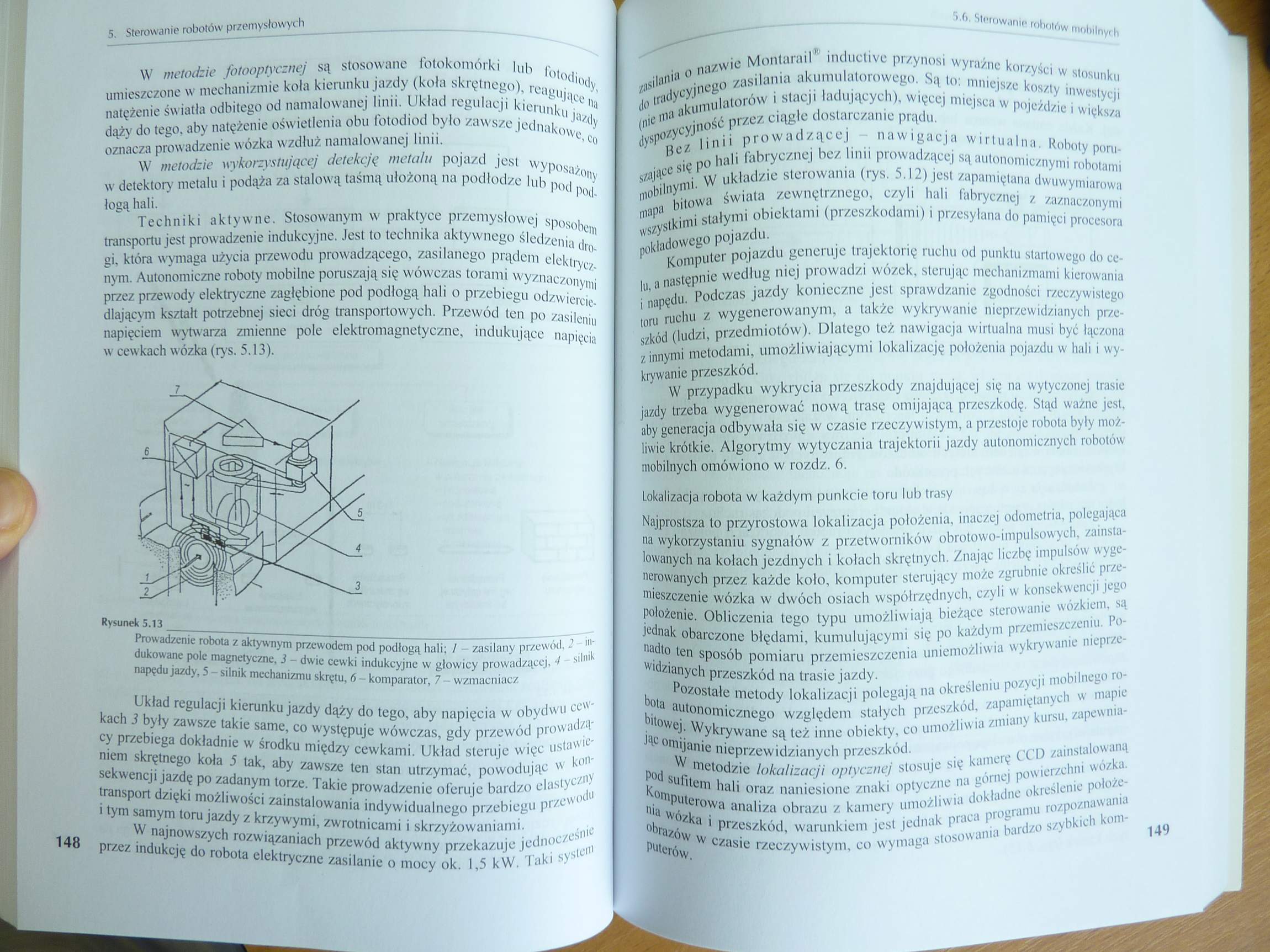
Techniki aktywne. Stosowanym w praktyce przemysłowej sposobem transportu jest prowadzenie indukcyjne. Jest to technika aktywnego śledzenia drogi, która wymaga użycia przewodu prowadzącego, zasilanego prądem elektrycznym. Autonomiczne roboty mobilne poruszają się wówczas torami wyznaczonymi przez przewody elektryczne zagłębione pod podłogą hali o przebiegu odzwierciedlającym kształt potrzebnej sieci dróg transportowych. Przewód ten po zasileniu napięciem wytwarza zmienne pole elektromagnetyczne, indukujące napięcia w cewkach wózka (rys. 5.13).
Rysunek ' T
Prowadzenie robota z aktywnym przewodem pod podłogą hali; / — zasilany przewód. 2 - indukowane pole magnetyczne, 3 - dwie cewki indukcyjne w głowicy prowadzącej, 4 - silnik napędu jazdy, 5 - silnik mechanizmu skrętu, 6 - komparator, 7 — wzmacniacz
Układ regulacji kierunku jazdy dąży do tego, aby napięcia w obydwu cewkach 3 były zawsze takie same, co występuje wówczas, gdy przewód prowadzący przebiega dokładnie w środku między cewkami. Układ steruje więc ustawieniem skrętnego koła 5 tak, aby zawsze ten stan utrzymać, powodując w konsekwencji jazdę po zadanym torze. Takie prowadzenie oferuje bardzo elastyczny transport dzięki możliwości zainstalowania indywidualnego przebiegu przewodu i tym samym toru jazdy z krzywymi, zwrotnicami i skrzyżowaniami.
W najnowszych rozwiązaniach przewód aktywny przekazuje jednocześnie 148 przez indukcję do robota elektryczne zasilanie o mocy ok. 1,5 kW. Taki system
zasilania o nazwie Montarail® inductive przynosi wyraźne korzyści w stosunku do tradycyjnego zasilania akumulatorowego. Są to: mniejsze koszty inwestycji <nic ma akumulatorów i stacji ładujących), więcej miejsca w pojeździć i większa dyspozycyjność przez ciągłe dostarczanie prądu.
Bez linii prowadzącej - nawigacja wirtualna. Roboty poruszające się po hali fabrycznej bez linii prowadzącej są autonomicznymi robotami mobilnymi. W układzie sterowania (rys. 5.12) jest zapamiętana dwuwymiarowa mapa bitowa świata zewnętrznego, czyli hali fabrycznej z zaznaczonymi wszystkimi stałymi obiektami (przeszkodami) i przesyłana do pamięci procesora pokładowego pojazdu.
Komputer pojazdu generuje trajektorię ruchu od punktu startowego do celu, a następnie według niej prowadzi wózek, sterując mechanizmami kierowania i napędu. Podczas jazdy konieczne jest sprawdzanie zgodności rzeczywistego tom ruchu z wygenerowanym, a także wykrywanie nieprzewidzianych przeszkód (ludzi, przedmiotów). Dlatego też nawigacja wirtualna musi być łączona z innymi metodami, umożliwiającymi lokalizację położenia pojazdu w hali i wykrywanie przeszkód.
W przypadku wykrycia przeszkody znajdującej się na wytyczonej trasie jazdy trzeba wygenerować nową trasę omijającą przeszkodę. Stąd ważne jest, aby generacja odbywała się w czasie rzeczywistym, a przestoje robota były możliwie krótkie. Algorytmy wytyczania trajektorii jazdy autonomicznych robotów mobilnych omówiono w rozdz. 6.
Lokalizacja robota w każdym punkcie toru lub trasy
Najprostsza to przyrostowa lokalizacja położenia, inaczej odometria, polegająca na wykorzystaniu sygnałów z przetworników obrotowo-impulsowych, zainstalowanych na kołach jezdnych i kołach skrętnych. Znając liczbę impulsów wygenerowanych przez każde koło, komputer sterujący może zgrubnie określić przemieszczenie wózka w dwóch osiach współrzędnych, czyli w konsekwencji jego położenie. Obliczenia tego typu umożliwiają bieżące sterowanie wózkiem, są jednak obarczone błędami, kumulującymi się po każdym przemieszczeniu. Ponadto ten sposób pomiaru przemieszczenia uniemożliwia wykrywanie nieprzewidzianych przeszkód na trasie jazdy.
Pozostałe metody lokalizacji polegają na określeniu pozycji mobilnego robota autonomicznego względem stałych przeszkód, zapamiętanych w mapie bitowej. Wykrywane są też inne obiekty, co umożliwia zmiany kursu, zapewniając omijanie nieprzewidzianych przeszkód.
W metodzie lokalizacji optycznej stosuje się kamerę CCD zainstalowaną pod sufitem hali oraz naniesione znaki optyczne na górnej powierzchni wózka. Komputerowa analiza obrazu z kamery umożliwia dokładne określenie położenia wózka i przeszkód, warunkiem jest jednak praca programu rozpoznawania obrazów w czasie rzeczywistym, co wymaga stosowania bardzo szybkich komputerów.
149
Wyszukiwarka
Podobne podstrony:
P1080288 7. Napędy robotów przemysłowych Przekładnie linowe są stosowane w robotach jako układy w za
P1080243 Il Sterowanie robotów przemysłowych modułowej budowie są wygodne do aplikacji, diagnozowani
P1080240 5. Sterowanie robotów przemysłowych wymagać także pewne wielkości, na które robot nie ma be
79631 P1080244 5. Sterowanie robotów przemysłowych we, regulację PID oraz funkcje sterowania silniki
P1080241 5. Sterowanie robotów przemysłowych Rysunek S.4_____ Klasyfikacja układów sterowania robotó
55128 P1080239 5. Sterowanie robotów przemysłowych hiperbola, elipsa). Przeznaczona jest szczególnie
więcej podobnych podstron