P1080333
10. Sztuczna inteligencja w robotyce
Podstawowe zadanie systemu planowania i wykonania działań polega na formowaniu i realizacji programu oddziaływań na świat zewnętrzny , prowadzących do osiągnięcia postawionego celu. Planowanie działań inteligent, nego robota zazwyczaj jest przedstawiane jako proces rozwiązywania zadań przy czym zadanie jest traktowane w możliwie najszerszym sensie jako różnica między bieżącym a pożądanym stanem świata (środowiska). Plan lub rozwiązanie zadania to kolejność działań zmieniająca bieżący stan świata w stan pożądany. I tak, dla robota montażowego planem będzie kolejność operacji związanych z przemieszczeniem obrobionych przedmiotów z bieżących pozycji na pozycje pożądane, odpowiadające zmontowanemu wyrobowi, przy czym jako I operacja rozumiane są np. takie działania, jak „połączyć przedmiot A z przedmiotem 5”, „wkręcić śrubę” itp. Oczywiście, aby wykonać te działania, muszą] one być rozbite na elementarne ruchy wykonywane przez manipulator. Funkcję tę realizuje blok planowania ruchów elementarnych urządzenia wykonawczego,! który buduje program ruchów wykonywanych następnie za pomocą układu ste-1 rowania robota [103].
10.3. Sieci neuronowe w robotach adaptacyjnych II generacji
10.3.1. Budowa sieci neuronowych
Jednym z możliwych bionicznych rozwiązań układów sterowania robota jest zastąpienie algorytmu sterowania przez sztuczną sieć neuronową,, zbudowaną! z elementów neuropodobnych (perceptronów) [66, 76, 77, 133, 134], zwaną też siecią neuronalną.
Komórka nerwowa (neuron) jest układem bardzo złożonym. Najczęściej przedstawia się ją jako komórkę z wystającymi kilkoma dendrytami i aksonem! zakończonym kilkoma synapsami (rys. 10.3).
3 - akson, 4 - dendryt, 5 - synapsa
W rzeczywistości komórka nerwowa ma kilka tysięcy dendrytów, a z innymi neuronami kontaktuje się poprzez miliony połączeń. Powierzchnia neuronu nie jest zwykłą gładką błoną. Znajduje się na niej około miliona tzw. sodowo-.polasowych pomp adenozyno-trójfosfatazowych, odpowiedzialnych za utrzymanie na wewnętrznej stronie błony potencjału -70 mV względem otoczenia. Odbywa się to przez „wypompowywanie” jonów sodu z wnętrza komórki, a wpuszczanie jonów potasu. Proces ten musi przebiegać ciągle, gdyż błona komórkowa jest nieszczelna i nie zapobiega zjawisku odwrotnemu, prowadzącemu do zniwelowania tej różnicy potencjałów.
Bodziec dostarczony do komórki powoduje zmianę jej stanu elektrycznego, przebiegającą następnie wzdłuż aksonu. Dzieje się to jednak nie w wyniku przewodnictwa elektrycznego, a przez ekspansję lokalnych zmian stanu elektrycznego błonykomórkowej. Zmiany potencjału błony są skutkiem jej zmiennej przepuszczalności dla jonów sodowych i potasowych. Po przejściu impulsu błona powraca do normalnego stanu. Dojście impulsu do synapsy (połączenia akson-dendryt lub dendryt z inną komórką) powoduje uwolnienie z komórki pobudzającej fięurotransmitera, który z kolei jest przyczyną pobudzenia komórki odbierającej impuls. Neurotransmiter to związek chemiczny przekazujący informację między neuronami. Pobudzenie neuronu odbierającego sygnał jest tym większe, im więcej neurotransmitera wydzieli się z kolbki synaptycznej komórki pobudzającej. Łączne pobudzenie komórki nerwowej jest sumą pobudzeń na wszystkich połączeniach synaptycznych. Fakt ten ma bardzo duże znaczenie przy tworzeniu modelu neuronu i jest podstawą teorii sztucznych sieci neuronowych.
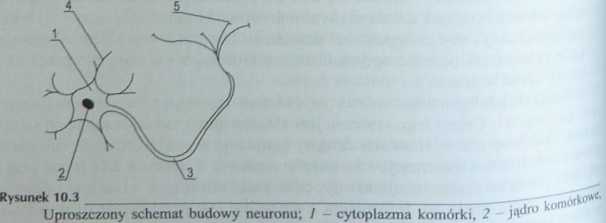
W praktyce do budowy sztucznych sieci neuronowych przyjmuje się model neuronu w postaci.pokazanej na rys. 10.4.
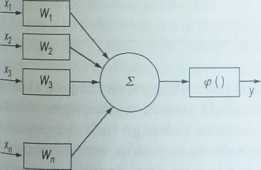
Rysuńekip;4_
Model neuronu
Pbe < ■ moc^u tym. zmianę wagi synaptycznej A1F,01 neuronu podczas J cia z chwili j do j + 1, która zależy od jego stanu yw oraz stanu wejścia .t,°\ ,ząje się wg wzoru
(10.1)
313
7^.03
Wyszukiwarka
Podobne podstrony:
62640 P1080339 10. Sztuczna inteligencja w robotyce Idea sterowania z wykorzystaniem reguł rozmytych
P1080334 10. Sztuczna inteligencja w robotyce Zmodyfikowana waga 00.2) W procesie samouczenia, opisa
74879 P1080341 10. Sztuczna inteligencja w robotyce 10. Sztuczna inteligencja w robotyce Nowe wagi k
więcej podobnych podstron