23 luty 07 (110)
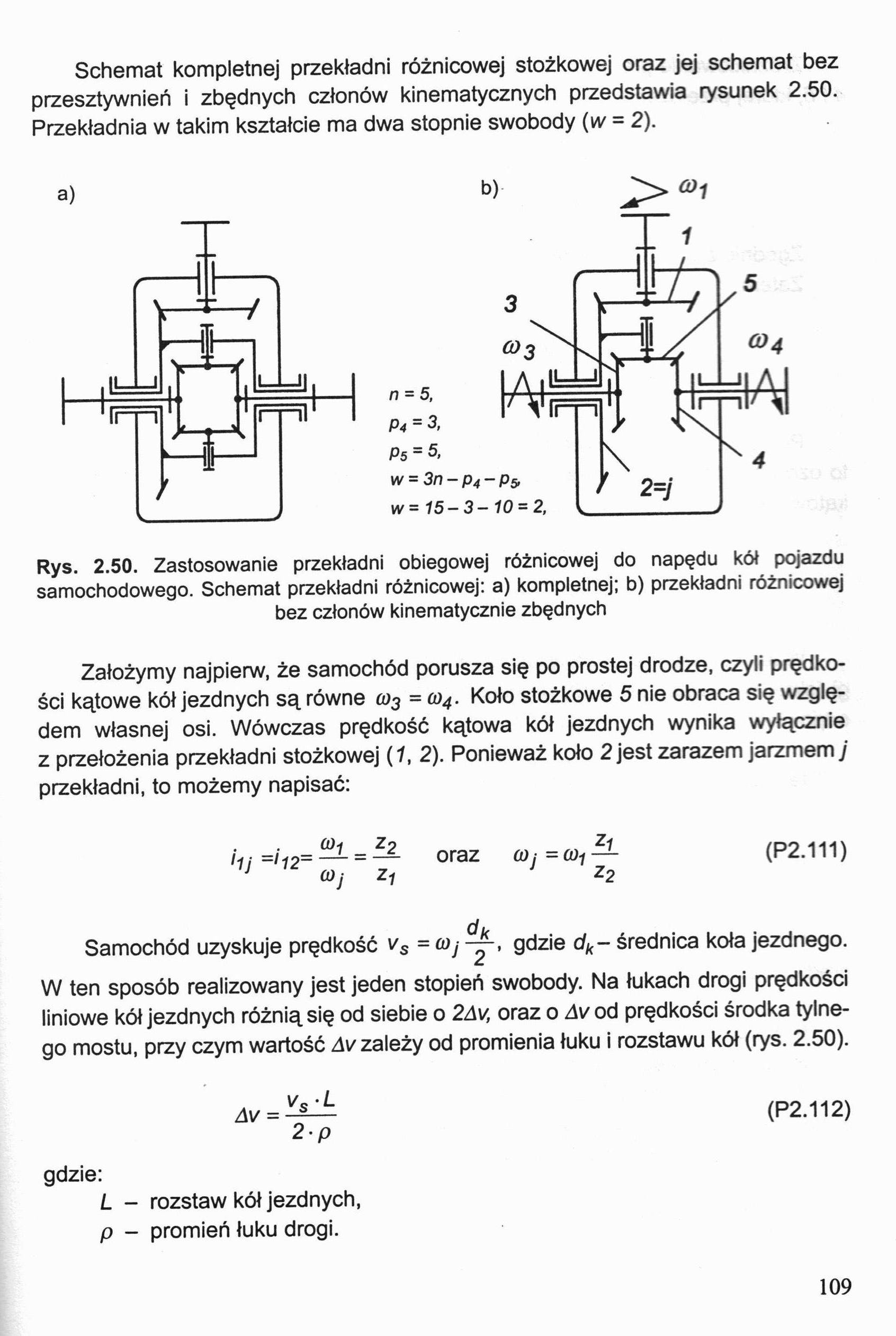
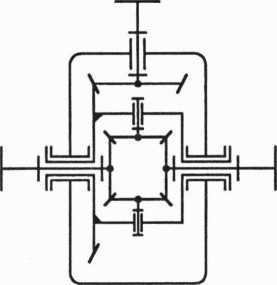
Schemat kompletnej przekładni różnicowej stożkowej oraz jej schemat bez przesztywnień i zbędnych członów kinematycznych przedstawia rysunek 2.50. Przekładnia w takim kształcie ma dwa stopnie swobody (w = 2).
a)
b) <y7
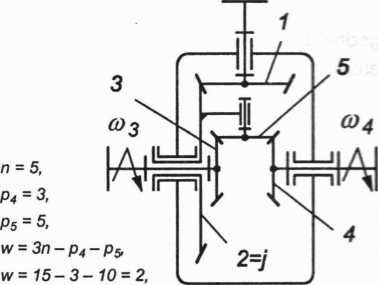
Rys. 2.50. Zastosowanie przekładni obiegowej różnicowej do napędu kół pojazdu samochodowego. Schemat przekładni różnicowej: a) kompletnej; b) przekładni różnicowej bez członów kinematycznie zbędnych
Założymy najpierw, że samochód porusza się po prostej drodze, czyli prędkości kątowe kół jezdnych są równe co3 =u>4. Koło stożkowe 5 nie obraca się względem własnej osi. Wówczas prędkość kątowa kół jezdnych wynika wyłącznie z przełożenia przekładni stożkowej (1, 2). Ponieważ koło 2 jest zarazem jarzmem j przekładni, to możemy napisać:
in=ii2= — = — oraz (Oj=coi— (P2.111)
(Oj z* z2
du
Samochód uzyskuje prędkość vs = coj —, gdzie dk- średnica koła jezdnego.
W ten sposób realizowany jest jeden stopień swobody. Na łukach drogi prędkości liniowe kół jezdnych różnią się od siebie o 2Av, oraz o /\vod prędkości środka tylnego mostu, przy czym wartość zależy od promienia łuku i rozstawu kół (rys. 2.50).
Av = ^-^ (P2.112)
2-p
gdzie:
L - rozstaw kół jezdnych, p - promień łuku drogi.
109
Wyszukiwarka
Podobne podstrony:
23 luty 07 (104) Rys. 2.45. Przekładnia obiegowa jednorzędowa o jednym stopniu swobody: a) schemat k
23 luty 07 (101a) Analiza kinematyczna przekładni obiegowych Przekładnie obiegowe mają w ogólnym prz
23 luty 07 (105) Ostatecznie przełożenie przekładni obiegowej wyniesiez3y Zj+z3 Zł) Z1 (P2.97) Przeł
23 luty 07 (108) Rozwiązanie Przełożenie przekładni można zapisać /)3 = —. 3j Wykorzystamy wzór na
23 luty 07 (109) Rozwiązanie Przełożenie przekładni obliczamy podobnie jak przełożenie iJ23 w przykł
23 luty 07 (19) Schemat kinematyczny w układzie płaskim V Rys. 1.10. Sporządzanie schematu kinematyc
23 luty 07 (93) 2.3.2. Analiza kinematyczna przekładni kołowych Przekładnie kołowe są mechanizmami k
23 luty 07 (101) Rys. 2.44. Schematy przekładni obiegowej z zaznaczonymi prędkościami kątowymi: a) b
23 luty 07 (103) Dla przekładni o dwóch stopniach swobody (przekładnia różnicowa, rys. 2.44a), w któ
23 luty 07 (112) Rys. 2.51. Schemat konstrukcyjny przekładni kształtowo-tocznej, e- mimośród - Rys.
23 luty 07 (99) Na rysunkach 2.41 i 2.42 pokazano schemat konstrukcyjny jednorzędowej przekładni obi
23 luty 07 (111) Zróżnicowanie prędkości kół umożliwia przekładnia stożkowa złożona z kół 3, 4 i 5,
23 luty 07 (31) Tablica 1.3 Schematy mechanizmów podstawowych klasy 2 z członem napędzającym 30
23 luty 07 (83) W celu obliczenia przyspieszenia kątowego różniczkujemy (P2.47) względem czasu A .2
23 luty 07 (86) W celu obliczenia przyspieszeń kątowych różniczkujemy równanie (P2.60) cofli cos(pi
23 luty 07 (90) W celu znalezienia prędkości kątowych i liniowych jarzma 3 różniczkujemy pierwsze z
23 luty 07 (94) Jeżeli moduł przełożenia kierunkowego j/£bj > 1, wówczas przekładnia służy do red
23 luty 07 (98) ■ -.0)1 _Z2 112--- — 0)2 Z1 Rys. 2.39. Przekładnia ślimakowa z, -
23 luty 07 * * AA>TEORIA MASZYN I $ Q19-2004 JOZEF FELIS, HUBERT JAWOROWSKI, JACEK CIEŚLIK * *CZE
więcej podobnych podstron