23 luty 07 (72)
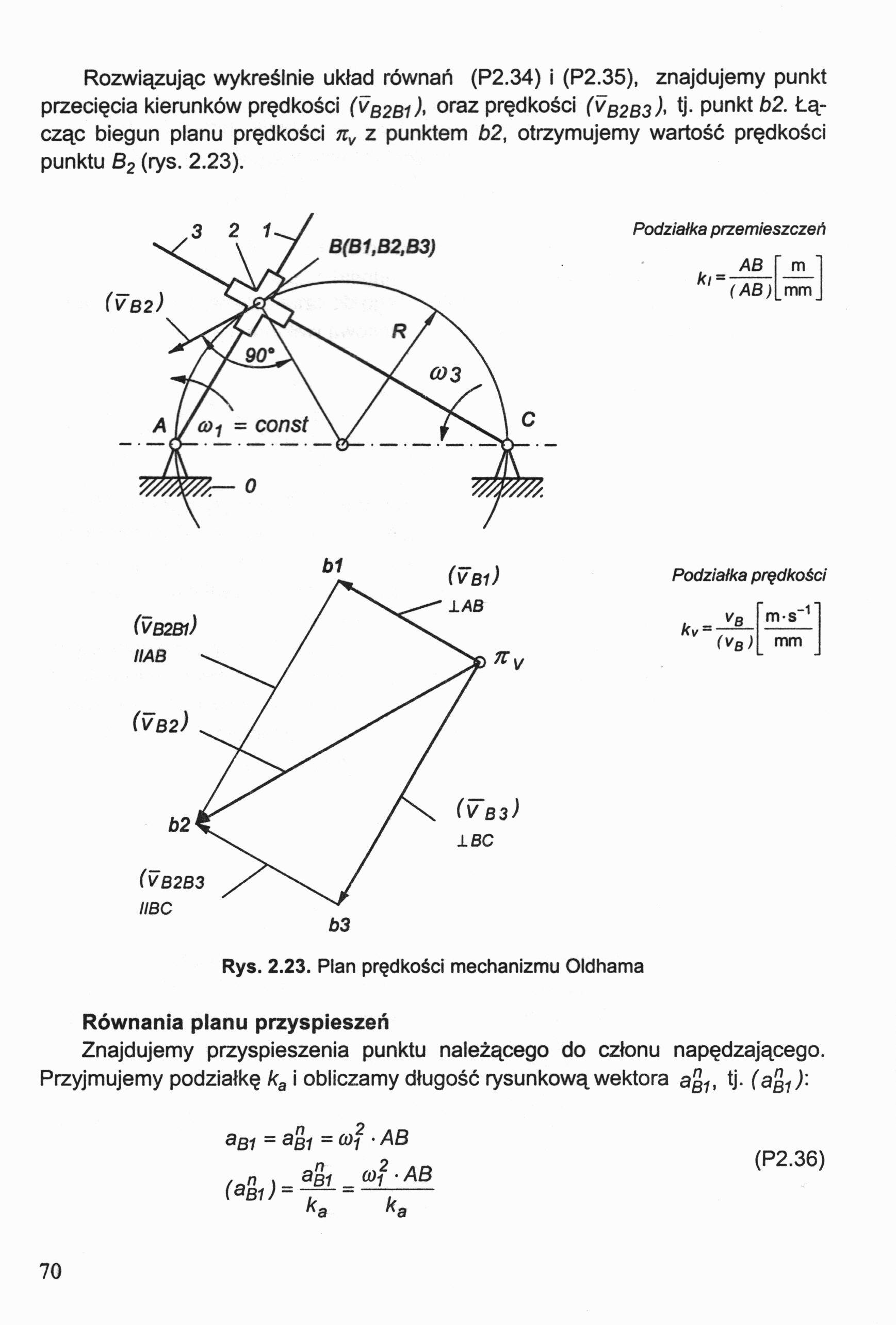
Rozwiązując wykreślnie układ równań (P2.34) i (P2.35), znajdujemy punkt przecięcia kierunków prędkości (vB2B1 ), oraz prędkości (vB2B3 )< tj. punkt b2. Łącząc biegun planu prędkości nv z punktem b2, otrzymujemy wartość prędkości punktu B2 (rys. 2.23).
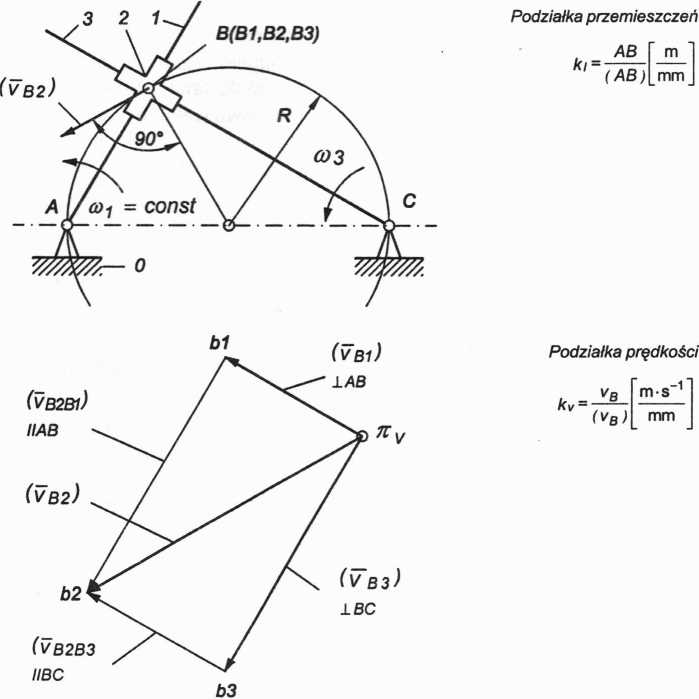
Rys. 2.23. Plan prędkości mechanizmu Oldhama
Równania planu przyspieszeń
Znajdujemy przyspieszenia punktu należącego do członu napędzającego. Przyjmujemy podziałkę ka i obliczamy długość rysunkową wektora aB1, tj. (aB1)'-
aB1 = aB1 ~ wi '
(P2.36)
70
Wyszukiwarka
Podobne podstrony:
23 luty 07 (133) Rozwiązanie w układzie płaskim dowolnego równania wektorowego, czyli narysowanie pl
23 luty 07 (144) Rozwiązanie graficzne równania (P3.18) przedstawiono na rysunku 3.24b. Wartość reak
23 luty 07 (87) Rozwiązanie Na podstawie rysunku 2.30 zapiszemy równanie wektora promienia wodzącego
23 luty 07 (89) Rozwiązanie Wpisujemy w analizowany mechanizm zamknięty trójkąt wektorów i zapisujem
23 luty 07 (108) Rozwiązanie Przełożenie przekładni można zapisać /)3 = —. 3j Wykorzystamy wzór na
23 luty 07 (109) Rozwiązanie Przełożenie przekładni obliczamy podobnie jak przełożenie iJ23 w przykł
23 luty 07 (6) 3.4.4. Przykłady rozwiązywania problemów z tarciem w mechanizmach p
23 luty 07 (41) Do opisu postępowego ruchu bryły wystarczy wybrać jeden dowolny punkt należący do br
23 luty 07 (132) Rys. 3.16. Człony czworoboku przegubowego oswobodzone od więzów Rozwiązujemy układ
23 luty 07 (138) Następnie w celu wykreślnego rozwiązania równania (P3.7) obliczamy wartości rysunko
23 luty 07 (114) Pierwsze zadanie dynamiki. Dla zadanych kinematycznych równań ruchu mechanizmu nale
23 luty 07 (59) Rys. 2.16. Plan przyspieszeń punktów mechanizmu korbowo-suwakowego Rozwiązujemy wykr
23 luty 07 (84) Przekształcamy układ równań (P2.52) do postaci: If coscpi +l2 cos(p2 -10 = -l3 cosę3
23 luty 07 (10) Ciało sztywne to układ punktów materialnych, w którym wzajemne odległości dwóch dowo
23 luty 07 (119) W równaniach (3.1) i (3.2) przyjęto oznaczenia: Pi - wektor główny sił zewnętrznych
23 luty 07 (120) Zgodnie z zasadą d Alemberta zagadnienia dynamiki zapisane równaniami (3.1) i (3.2)
23 luty 07 (126) Proponowany sposób oswobadzania od więzów jest wygodny przy rozwiązywaniu zadań z u
23 luty 07 (130) Jeżeli w mechanizmie zastąpimy pary kinematyczne ki. 4 parami ki. 5, to równanie (3
23 luty 07 (131) Dwa pierwsze równania (3.21) przedstawiają sumy współrzędnych wszystkich sił działa
więcej podobnych podstron