24 luty 07 (85)
Przykład 3.26
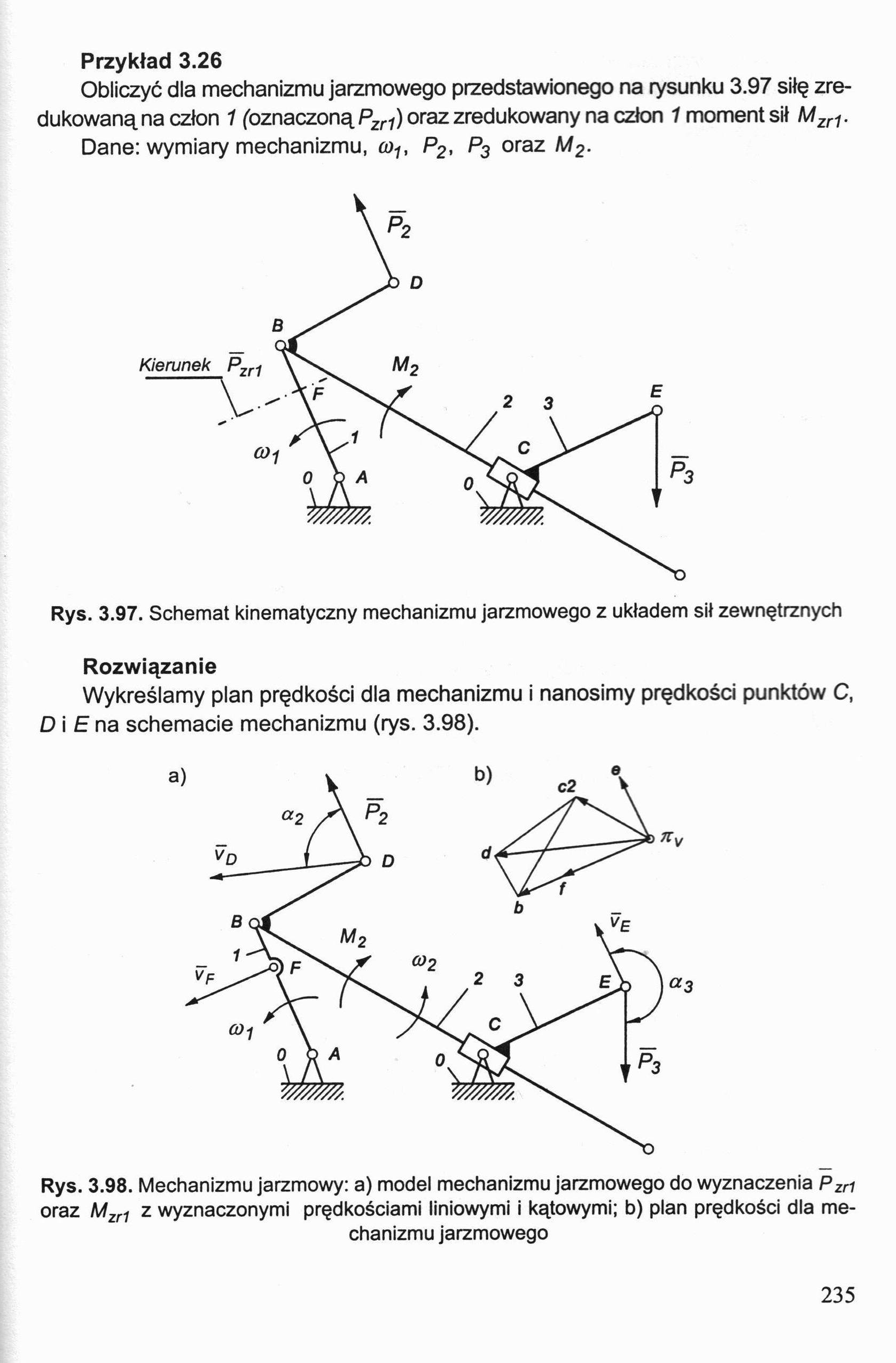
Obliczyć dla mechanizmu jarzmowego przedstawionego na rysunku 3.97 siłę zredukowaną na człon 1 ("oznaczoną Pzr1) oraz zredukowany na człon 1 moment sił Mzr1. Dane: wymiary mechanizmu, co1t P2, P3 oraz M2.
Rys. 3.97. Schemat kinematyczny mechanizmu jarzmowego z układem sił zewnętrznych Rozwiązanie
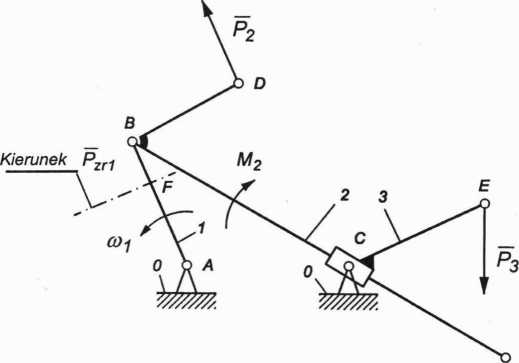
Wykreślamy plan prędkości dla mechanizmu i nanosimy prędkości punktów C, D i E na schemacie mechanizmu (rys. 3.98).
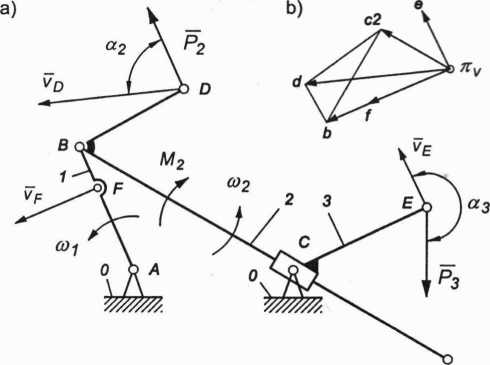
Rys. 3.98. Mechanizmu jarzmowy: a) model mechanizmu jarzmowego do wyznaczenia Pzrj oraz Mzr1 z wyznaczonymi prędkościami liniowymi i kątowymi; b) plan prędkości dla mechanizmu jarzmowego
235
Wyszukiwarka
Podobne podstrony:
24 luty 07 (100) Rozwiązanie Po obliczeniu zredukowanego na wał silnika momentu bezwładności układu
24 luty 07 (105) Przykład 3.31 Dany jest model fizyczny układu napędowego maszyny wyciągowej w posta
24 luty 07 (111) Przykład 3.32 Na wale wirnika układu napędowego (rys. 3.112) zamontowana jest tarcz
24 luty 07 (115) Przykład 3.34 Masy i siły działające na człony maszyny zredukowano do członu napędz
24 luty 07 (124) Przykładowe charakterystyki Mc(ę) i Mb((p) pokazano na rysunku 3.121. Rys. 3.121. P
24 luty 07 (21) Przykład 3.13 Wyznaczyć reakcje rĄt w punkcie A oraz siłę P2 w warunkach tarcia śliz
24 luty 07 (29) Przykład 3.16 Wyznaczyć reakcje w parach kinematycznych mechanizmu krzywkowego i mom
24 luty 07 (58) Przykład 3.20 Dany jest wirnik o masie M obracający się wokół osi Oz z prędkością ką
24 luty 07 (72) Przykład 3.24 Rozmieścić przeciwciężary celem wyrównoważenia całkowitego i częściowe
24 luty 07 (12) Zasada mocy chwilowych. Jeżeli mechanizm złożony z członów sztywnych połączonych ze
24 luty 07 (142) Rys. 3.134. Modyfikacja charakterystyki mechanicznej silnika napędowego zredukowane
24 luty 07 (155) Rys. 4.8. Modelowanie i analiza kinematyczna mechanizmu złożonego o strukturze szer
24 luty 07 (42) Rys. 3.68. Analiza statyczna mechanizmu z uwzględnieniem tarcia: a) analiza sił dzia
24 luty 07 (62) Rys. 3.84. Schemat dwucylindrowego silnika w układzie rzędowym Na podstawie (3.77) w
Fimfo 0028 Przykład 2.4. Przeprowadzić obliczenia sprawdzające spoin wspornika przedstawionego na $
23 luty 07 (22) 1.1.6.3. Przykłady obliczania ruchliwości mechanizmów płaskich Obliczenie ruchliwośc
24 luty 07 (133) Do obliczeń można wykorzystać programy matematyczne np. program MATLAB lub arkusz k
23 luty 07 (35) Przykład 1.15 (rys. 1.26) Analizowany łańcuch kinematyczny jest mechanizmem klasy 3
24 luty 07 (107) Wyznaczenie pozostałych zależności (P3.204) D cos = m1; (Oj = cob; vA = rjcoj; vB =
więcej podobnych podstron