346 (10)
346 Podstawy nawigacji morskiej
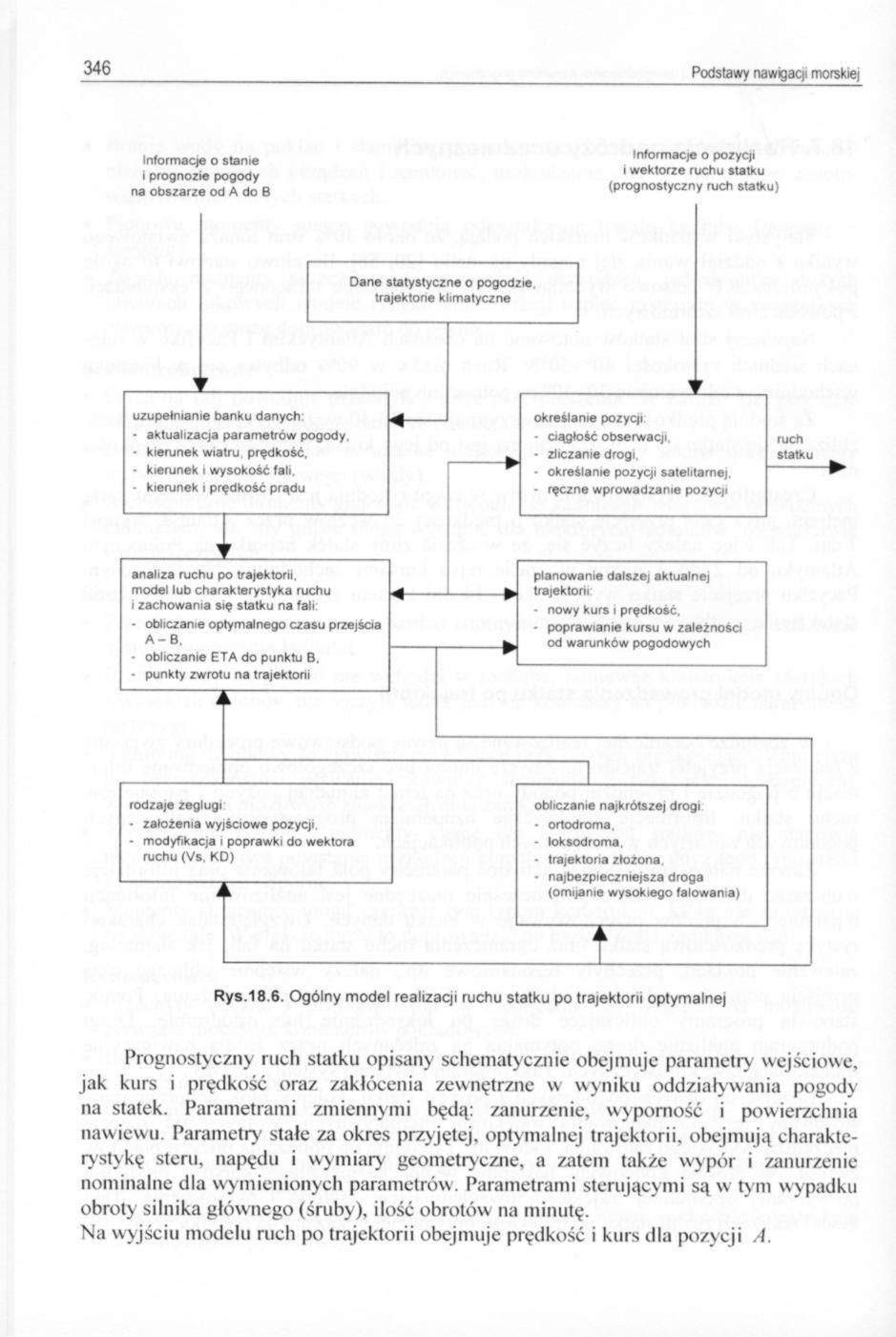
Informacje o stanie i prognozie pogody na obszarze od A do B
Informacje o pozycji i wektorze ruchu statku (prognostyczny ruch statku)

Rys.18.6. Ogólny model realizaqi ruchu statku po trajektorii optymalnej
Prognostyczny ruch statku opisany schematycznie obejmuje parametry wejściowe, jak kurs i prędkość oraz zakłócenia zewnętrzne w wyniku oddziaływania pogody na statek. Parametrami zmiennymi będą: zanurzenie, wyporność i powierzchnia nawiewu. Parametry stałe za okres przyjętej, optymalnej trajektorii, obejmują charakterystykę steru, napędu i wymiary geometryczne, a zatem także wypór i zanurzenie nominalne dla wymienionych parametrów. Parametrami sterującymi są w tym wypadku obroty silnika głównego (śruby), ilość obrotów na minutę.
Na wyjściu modelu ruch po trajektorii obejmuje prędkość i kurs dla pozyeji A.
Wyszukiwarka
Podobne podstrony:
434 (10) 434 Podstawy nawigacji morskiej • wyznaczenie podstawowych metod określan
442 (7) 442 Podstawy nawigacii morskiej Informacje o eksploatacji bogactw naturalnych z dna morskieg
370 (10) 370 Podstawy nawigaqi morskie] Bliższa analiza zadań od I do 5 sprecyzuje plan działania ob
376 (10) 376 Podstawy nawigacji morskie) Zjawisko pływów ma szczególne znaczenie w żegludze morskiej
380 (10) 380 Podstawy nawigacji morskiej Podstawy dynamicznej teorii pływów W teorii dynamicznej pły
444 (8) 444 Podstawy nawigaqi morskiej20.8. Zakres informacji i rodzaje poradników dotyczących plano
352 (13) 352 Podstawy nawigaqi morskiej 9. Przeanalizowanie informacji klimatyczny
416 (7) 416 Podstawy nawigacji morskiej19.10. Prądy pływowe Poziomy ruch mas wody, wywołany siłami g
272 (13) 272 Podstawy nawigacji morskie]14.8. Podstawowe kierunki i wektory w nawigacji morskiej 1.
274 (15) 274 Podstawy nawigaqi morskiej Rys. 14.20. Znaki poprawek na prąd 5. Elementy żeglugi na
276 (14) 276 Podstawy nawigacji morskiej • czas przejścia t, •
282 (14) 282 Podstawy nawigacji morskiei Niżej omówione zostaną jedynie te zjawiska, które dotyczą w
284 (15) 284 Podstawy nawigaqi morskiej Faza podejścia do lądu (Landfall) W tej fazie nawigator, dla
286 (13) 286 Podstawy nawigaqi morskiej Rys. 15.7. Typowy przykład określania pozycji radarowych z k
288 (13) 288 Podstawy nawigacji morskie) Błąd wektorowy odległości wynosi: 0=0.01 -Z [m]
290 (13) 290 Podstawy nawigacji morskiej 3) w czasie ruchu należy śledzić przyjęte
294 (14) 294 Podstawy nawigacji morskiej15.3. Dokładność wskazań radaru do celów nawigacyjnych Wiele
296 (13) 296 Podstawy nawigaqi morskiej Wybór czasu trwania impulsów może być dokonywany w radarach
298 (14) 298 Podstawy nawigacji morskiej Głównym parametrem wpływającym na zasięg radaru jest moc sy
więcej podobnych podstron