DSCN0433 (Large)

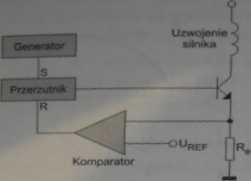
Rys. 2.3. Schemat blokowy impulsowego (PWM) sterownika silnika elektrycznego
samej stałej czasowej R/L prąd osiągnie wartość nominalną dwukrotnie szybciej W układzie z rysunku 2.2a zastosowano rezystor szeregowy Rs. Rezystor ten zmną sza stałą czasową do wartości \J( R + Rs) i ogranicza prąd uzwojenia. Wartość tezy. stancji powinna wynosić Rs = (Uz- W układzie z rysunku 2.2b tranzystor
pracuje jako źródło prądowe o wydajności I = (Urep — UBE)/RE. W momencie załączenia tranzystor nasyca się i prąd uzwojenia narasta z szybkością zależną od napięci zasilania Uz. Po osiągnięciu wartości równej wydajności źródła tranzystor wychodj z nasycenia — następuje ograniczenie prądu. Wadą obu układów są bardzo duże sum mocy: na rezystorze Rs w układzie pokazanym na rysunku 2.2a i na tranzystora w układzie z rysunku 2.2b. Przykładowo dla Uz = 2 ■ U dodatkowa moc niezbędna4 prawidłowej pracy układu jest taka sama jak moc pobierana przez silnik.
Rozwiązaniem pozbawionym tej wady i pozwalającym na pracę silnika z dużym prędkościami jest kluczowane sterowanie prądowe PWM (current eontroi lub/wito current loop).
Na rysunku 2.3 pokazano schemat blokowy sterownika silnika pracującego w ten sposób. Układ ten ma dużą sprawność i pozwala na regulację prądu uzwojenia niezależni od wartości napięcia zasilającego (poprzez zmianę wartości napięcia Uref)- Wyfats czasowy jednego impulsu prądu w uzwojeniu zilustrowano na rysunku 2.4. Napięcie zasilania +UZ jest znacznie wyższe od napięcia pracy uzwojenia co powoduje, że po załączeniu tranzystora prąd osiąga wartość znamionową w czasie dużo krótszym od
Prąduzw.
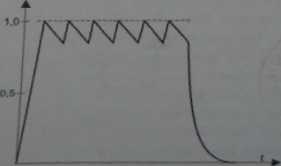
Rys. 2.4. Przebieg ilustrujący ksztatt pojedynczego Impulsu prądu w uzwojeniu silnika podczas sterowania impulsowego
Wyszukiwarka
Podobne podstrony:
DSCN0430 (Large) Rys. 2.3. Schemat blokowy impulsowego (PWM) sterownika silnika elektrycznego samej
6 (845) Rys. 10.6. Schemat blokowy Impulsowego spoktrometru NMR.10.7.1. Elektromag
Rys. 1. Schemat blokowy falownikowego napędu trakcyjnego z silnikiem indukcyjnym i sterowaniem
Rys. 3. Schemat blokowy układu pośredniego sterowania momentem i strumieniem wirnika. Zadane napięci
ELEMENTY WYKONAWCZE OBIEKT STEROWANIA Rys. 1.2. Schemat blokowy układu pneumatycznego [3]. Rysunek
Rys. 1.1. Schemat blokowy robota: A - układ zasilania, B - układ sterowania, C - układ
DSCN0435 (Large) Rys. 2.5. Przykładowe sterowniki bipolarnych tranzystorów mocy dla prądów: poniżej
Image147 U(t) Rys. Schemat blokowy układu opisanego równaniem stanu i równaniem wyjścia
Image148 Rys. Schemat blokowy układu gdy wektory U(t)=u(t) i Y(t)=y(t) są jednowymiarowe
Image156 Rys. Schemat blokowy układu gdy sygnały sterujące oddziały wuj ą także na sygnały wyjściowe
zadanych Rys. 8. Otrzymana charakterystyka wskazań magnetometru w kierunku osi X i Y Rys. 6. Schemat
więcej podobnych podstron