P1080354 (2)
12. Badanie dokładności robotów przemysłowych
przy czym

02.15)
02.16)
h ='J(xj -*Y +(yj -y)2 +(zj-z)2

02.17)
gdzie: x,y, z - współrzędne środka ciężkości punktów osiągniętych przez tę samą pozycję zadaną w razy, Xj, yj, z, - współrzędney-tej pozycji osiągniętej. Powtarzalność orientacji natomiast ma postać
(12.18)
(12.19)
(12.20) gdzie: a, b, c-wartości kątów zadanej pozycji, aj,bj,Cj— wartości kątów y-tej pozycji osiągniętej.
W tablicy 12.1 zestawiono warunki testowe dla badania powtarzalności pozycjonowania. Procedura testowa wygląda tak samo jak w przypadku badania dokładności pozycjonowania.
12.2.3. Powtarzalność pozycjonowania osiągana z wielu punktów (vAP)
Powtarzalność pozycjonowania osiągana z wielu punktów — jest to maksymalna odległość między średnią z osiągniętych pozycji zadanych n razy z jednego punktu w trzech ortogonalnych kierunkach PN-EN ISO 8373:2003 [170].
W celu opisania tej wielkości stosuje się następujące parametry:
— vAPp - jest to maksymalna odległość między środkami ciężkości zbioru punktów osiągniętych między końcami różnych ścieżek,
— vAPa, vAPf,, vAPc - maksymalna różnica między średnią wartością osiągniętych kątów na końcu różnych ścieżek PN-EN ISO 9283:2003 [171].
Powtarzalność pozycjonowania osiągana z wielu punktów wyraża się wzorem
|
vAPp =maxyj(xh-xk)2 + (yh -ykf +(Jh -Jkf |
(12,21) |
|
vAPa = max \ah -a4| |
(1222) |
|
vAPb = max|óA-bk\ |
(1123) |
|
vAPc =max|c* — ck\ |
(1224) |
gdzie: h,k = 1,2, 3 — numer ścieżki.
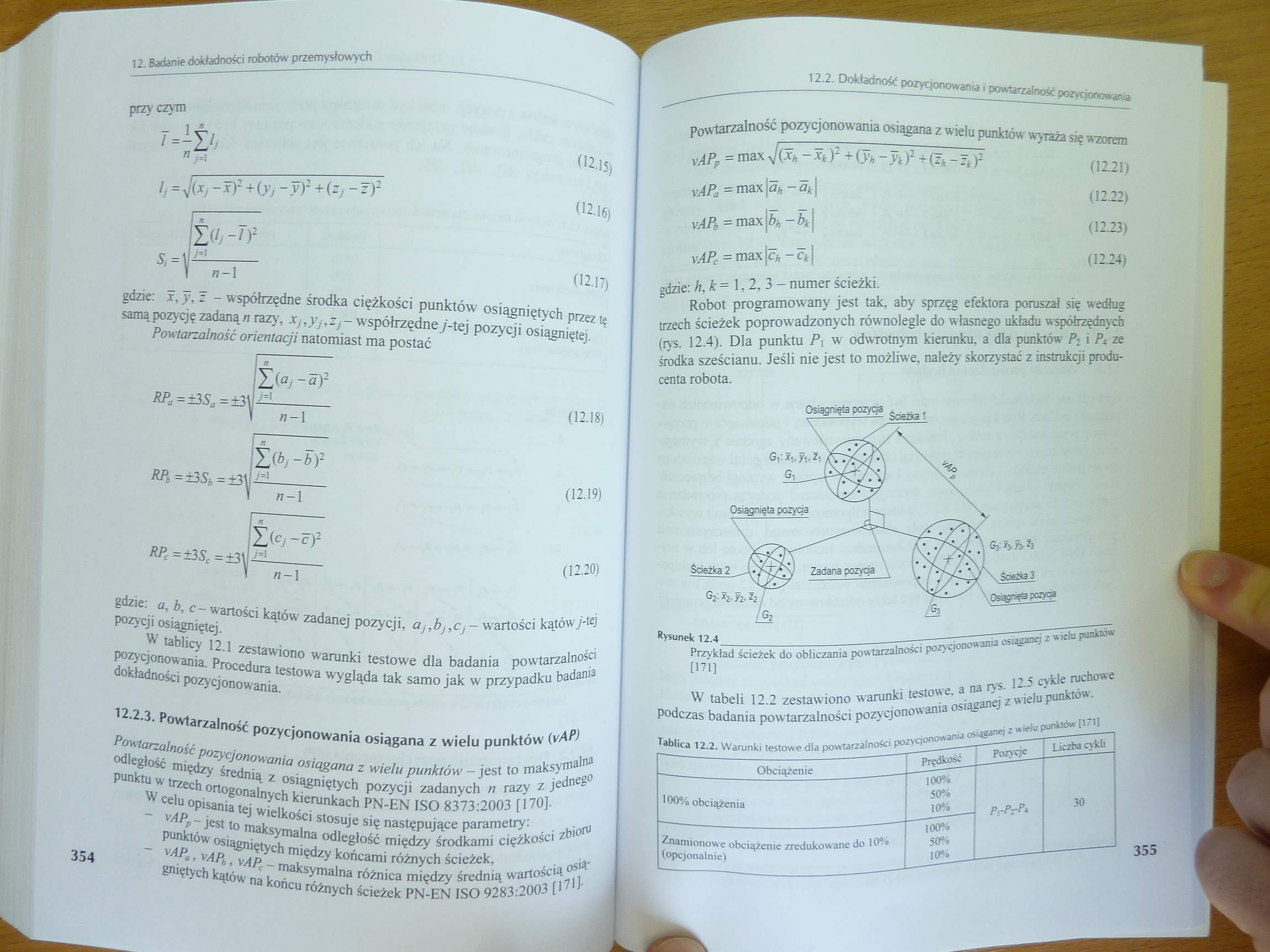
Robot programowany jest tak, aby sprzęg efektora poruszał się według trzech ścieżek poprowadzonych równolegle do własnego układu współrzędnych (rys. 12.4). Dla punktu P\ w odwrotnym kierunku, a dla punktów P2 i P4 ze środka sześcianu. Jeśli nie jest to możliwe, należy skorzystać z instrukcji producenta robota.
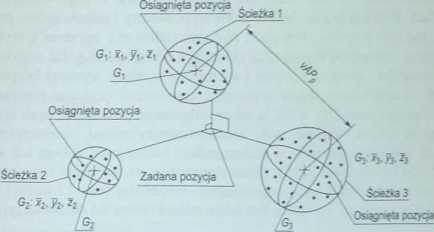
Rysunek 12.4__________ ____''
Przykład ścieżek do obliczania powtarzalności pozycjonowania osiąganej z wielu punktów H71]
W tabeli 12.2 zestawiono warunki testowe, a na rys. 12.5 cykle ruchowe podczas badania powtarzalności pozycjonowania osiąganej z wielu punktów.
Tablica 12.2. Warunki testowe dla powtarzalności pozycjonowania osiąganej z wielu punktów [171]
|
Obciążenie |
Prędkość |
Pozycje |
Liczba cykli |
|
100% obciążenia |
i 00% 50% 10% |
PrPrPą |
30 |
|
Znamionowe obciążenie zredukowane do 10% (opcjonalnie) |
100% 50% 10% |
355
Wyszukiwarka
Podobne podstrony:
73429 P1080354 (2) 12. Badanie dokładności robotów przemysłowych przy czym 02.15) 02.16) h = J(xj -*
P1080354 (2) 12. Badanie dokładności robotów przemysłowych przy czym 02.15) 02.16) h = J(xj -*Y +(yj
P1080358 (2) 12. Badanie dokładności robotów przemysłowych Kształt i rozmiar testowanych ścieżek nal
P1080359 (2) 12. Badanie dokładności robotów przemysłowych geometrycznych jest wyznaczana odległość
43177 P1080355 (2) 12. Badanie dokładności robotów przemysłowych 1 cykl Ścieżka 1 —► P Ścieżka 1 —
P1080359 (2) 12. Badanie dokładności robotów przemysłowych geometrycznych jest wyznaczana odległość
29439 P1080353 (2) 12. Badanie dokładności robotów przemysłowych APX =(x-xc) APy
P1080352 (2) 12. Badanie dokładności robotów przemysłowych z zachowaniem tych samych warunków środow
P1080353 (2) 12. Badanie dokładności robotów przemysłowych APX =(x-xc) APy
P1080355 (2) 12. Badanie dokładności robotów przemysłowych 1 cykl Ścieżka 1 —► P Ścieżka 1 —1►
P1080356 (2) 12. Badanie dokładności robotów przemysłowych Rysunek 118___ Relacja między punktem zad
P1080357 (2) 12. Badanie dokładności robotów przemysłowych Kształt i rozmiar testowanych ścieżek nal
P1080358 (2) 12. Badanie dokładności robotów przemysłowych Kształt i rozmiar testowanych ścieżek nal
P1080359 (2) 12. Badanie dokładności robotów przemysłowych geometrycznych jest wyznaczana odległość
29439 P1080353 (2) 12. Badanie dokładności robotów przemysłowych APX =(x-xc) APy
78504 P1080356 (2) 12. Badanie dokładności robotów przemysłowych Rysunek 118___ Relacja między punkt
38759 P1080357 (2) 12. Badanie dokładności robotów przemysłowych Kształt i rozmiar testowanych ścież
67677 P1080352 (2) 12. Badanie dokładności robotów przemysłowych z zachowaniem tych samych warunków
P1080352 (2) 12. Badanie dokładności robotów przemysłowych z zachowaniem tych samych warunków środow
więcej podobnych podstron