37836 skanuj0034 (63)

Mechanizm PPO
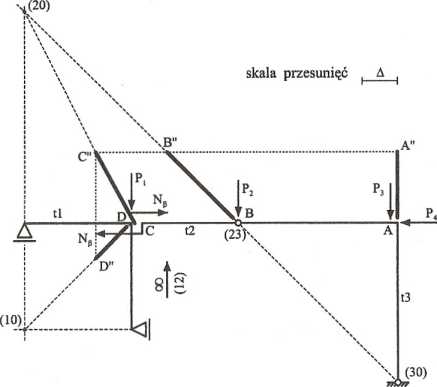
Równanie prac
L = O,
+Nfi-A+Nfi-2A+P1-A+P2-2A+P4-2A = 0,
W/,= -^(P1 + 2P2+2P4)= —i(60+2-15 +2-30) = —50 kN.
HA

Równanie prac
L = O,
Tfi-A + Tp-IA+P^ A-P2-A-Pą' A = 0,
$ = - \(Pi-Pz~Pd = -j(60-15-30)I: -5 kN.
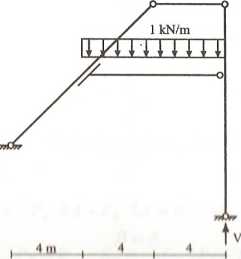
Przykład 25. Metodą kinematyczną wyznaczyć siłę w ściągu S i reakcję V Sporządzić plan przesunięć obróconych lub biegunowy plan przesunięć obróconych.
Schemat statyczny s
un
+ 1
Wyszukiwarka
Podobne podstrony:
55756 skanuj0002 (612) Tyczenie łuków trasy drogowej Dane wyjściowe: Punkty PI, P2, P3, P4 o współrz
70834 skanuj0033 (72) Mechanizm JT, PPO Mechanizm JT, PPO P, « 60 kN, P2m 15 kN, P4 - 30 kN, Równani
46227 skanuj0037 (61) Mechanizm „Z”, BPPO Mechanizm „Z”, BPPO Równanie prac (BPPO) L = O -> M0 =
skanuj0032 (70) Mechanizm „M”, PPO wielkość wirtualna Mechanizm itH”, PPO D" B" środek obr
skanuj0035 (64) Mechanizm „S PPO BPPOy Mechanizm „V”, PPO (12) środek obrotu 1 4
51856 skanuj0036 (65) Mechanizm „ff* PPO L= O, S-42H-S-8J+P,-2J+P2-2J =0, S= -^(Pj+Pj). Przykład 27.
skanuj0014 (63) PRÓBNY EGZAMIN MATURALNY Z MATEMATYKI PROPOZYCJA SCHEMATU OCENIANIA ARKUSZA Z POZIOM
więcej podobnych podstron