1070411763
Układ wizyjny do skanowania geometrii i pozycjonowania przedmiotu ... 43
i przeprowadzenie kolejnego skanowania z trzech kierunków. Obszar skanowany zostałby podzielony na sześć sektorów, ale każde dwa sąsiednie sektory miałyby znaczną część wspólną. W ten sposób można ograniczyć obszar skanowania tylko do fragmentów dobrze oświetlonych bez ryzyka pominięcia części powierzchni przy tworzeniu modelu 3D. Dodatkowym ułatwieniem przy zaawansowanym skanowaniu miejsc trudno dostępnych i normalnie niewidocznych dla żadnej z trzech kamer może być zastosowanie tzw. stołu uchylnego. Dzięki możliwości obrócenia detalu o znany niewielki kąt (widziany na obrazie jako przesunięcie rzędu ułamka piksela) możliwe jest ponadto wykorzystanie technik super-rozdzielczości w celu dodatkowego zwiększenia dokładności skanowania.
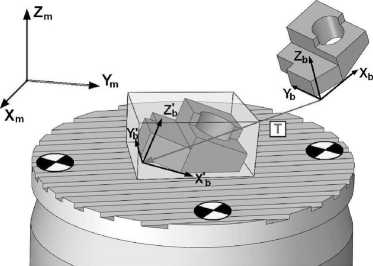
Rys.3. Transformacja bazowego układu odniesienia i wpasowanie detalu w zeskanowaną przygotówkę
Założeniem proponowanego systemu jest, iż przygotówkę zamocować można w dowolnym miejscu na stole w polu widzenia kamer. Skanowanie z kilku kierunków pozwala uzyskać zbiór powierzchni cząstkowych (rys.4), które należy połączyć w jedną, reprezentującą cały przedmiot (z wyłączeniem powierzchni niewidocznych dla kamer np. wewnątrz głębokich otworów lub zasłoniętych przez uchwyty). Wraz z przygotówką skanowane są uchwyty mocujące ją do stołu, które są eliminowane programowo z uzyskanego modelu, podobnie jak elementy niezmienne jak: tło, powierzchnia stołu, obudowa obrabiarki.
Proces wpasowania może być wspomagany przez wstępne zorientowanie modeli 3D względem siebie lub wskazanie pewnych kluczowych punktów wspólnych detalu i przygotówki. Warto zwrócić uwagę, iż nie zawsze jest to zadanie jednoznaczne, gdyż wpasowanie może prowadzić do wielu poprawnych rezultatów w przypadku dużego nadmiaru materiału przygotówki. Dodatkowym utrudnieniem jest konieczność identyfikacji uchwytów mocujących przedmiot na stole i odróżnienia ich od powierzchni przygotówki. W tym celu można zastosować oznaczenia uchwytów markerami i przygotować bazę modeli uchwytów do identyfikacji.
Wyszukiwarka
Podobne podstrony:
U KŁAD WIZYJNY DO SKANOWANIA GEOMETRII I POZYCJONOWANIA PRZEDMIOTU ... 45 Rys.5. P
ISSN 1896-77IX MODELOWANIE INŻYNIERSKIE 41, s. 39-46, Gliwice 2011UKŁAD WIZYJNY DO SKANOWANIA GEOMET
Skanowanie 09 03 08! 43 (15) ka do włókien nerwów obwodowych i wędruje wzdłuż nerwów, osiągając ośro
83299 Skanowanie 09 03 08! 43 (15) ka do włókien nerwów obwodowych i wędruje wzdłuż nerwów, osiągają
83299 Skanowanie 09 03 08! 43 (15) ka do włókien nerwów obwodowych i wędruje wzdłuż nerwów, osiągają
więcej podobnych podstron