9543518550
Rys. 8. Charakterystyki mechaniczne silnika indukcyjnego wykonawczego: a) przy sterowaniu amplitudowym; b) przy sterowaniu fazowym [11, s. 109]
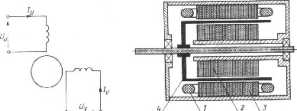
Wirnik silnika wykonawczego indukcyjnego nie ma komutatora, co zwiększa niezawodność silnika. Na ogół są to maszyny klatkowe, przy czym najczęściej - w celu zmniejszenia momentu bezwładności - klatkę wirnika stanowi niemagnetyczny kubek, wykonany z aluminium. Silniki z niemagnetycznym wirnikiem kubkowym noszą nazwę silników Ferrarisa (rys. 9).
\Z \zvT
Rys. 9. Zasada budowy silnika indukcyjnego kubkowego: 1 - uzwojenie stojana, 2,3 - zewnętrzna i wewnętrzna część magnetowodu, 4 - wirnik kubkowy [3, s. 263]
Prędkość kątową reguluje się przez regulację amplitudy lub przesunięcie fazowe napięcia zasilającego uzwojenia sterujące względem napięcia zasilającego uzwojenie wzbudzenia.
Moc dwufazowych silników indukcyjnych wynosi od około pół wata do kilkudziesięciu watów, znamionowa prędkość kątowa od 120 do 300 rad/s, a w szczególnych przypadkach osiąga 1500 rad/s (ok. 14000 obr./min). Są one najczęściej zasilane napięciem o częstotliwości 50Hz, a niekiedy 400Hz.
Silniki wykonawcze momentowe
Silniki momentowe nie są stosowane jako samodzielne elementy wykonawcze, lecz pełnią w nich rolę pomocniczą (np. w urządzeniach elektrohydraulicznych i elektropneumatycznych). Są natomiast stosowane, w urządzeniach autopilotów i stabilizatorów statków, jako korektory żyroskopów. Silnik wykonawczy momentowy jest przetwornikiem sygnału elektrycznego na położenie wału silnika. Przy braku obciążenia stałemu sygnałowi odpowiada ustalone położenie wału. Jeżeli pod wpływem zewnętrznego momentu sił wał silnika odchyli się od położenia ustalonego, to w silniku wytworzy się moment zwrotny (silnik zachowa się jak sprężyna).
Mikrosyn (rys. 10) jest przykładem silnika wykonawczego momentowego. Uzwojenia wzbudzenia oraz sterujące mikrosynu mogą być zasilane, zarówno napięciami stałymi jak i napięciami przemiennymi o jednakowej fazie .Zmianie ulega amplituda napięcia sterującego Us, natomiast amplituda napięcia wzbudzenia Uw pozostaje stała. Wirnik reluktancyjny ustawia się tak, aby oś reluktancji minimalnej pokrywała się z wypadkowym strumieniem
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego"
13
Wyszukiwarka
Podobne podstrony:
3tom175 5. ELEKTROENERGETYKA PRZEMYSŁOWA Rys. 5.9. Charakterystyki mechaniczne silnika indukcyjnego
Rys. 1. Charakterystyki mechaniczne silnika indukcyjnego przy różnych częstotliwościach
Rys. 2. Charakterystyki mechaniczne silników prądu stałego 1 i 2 - bocznikowego i obcowzbudnego: 1 p
Image 015 W9-5 W9-5 Rys. 6.3. Charakterystyka mechaniczna silnika asynchronicznego dla Sk= 0,2
Charakterystyka mechaniczna silnika indukcyjnego chrakterystyczne punkty i zakres pracy 11.Charakt
DSCF8496 62 Rys.6.1. Charakterystyka mechaniczna silnika skokowego wysokomomentowego 6.2.1. Zalety s
Ą > <h > -Pi Rys. 12. Charakterystyki mechaniczne silnika bocznikowego prądu stałego przy r
Rys. 13. Charakterysty ki ruchowe silnika indukcyjnego pracującego przy Lj = const,/i = const. dla 0
71.3. Charakterystyka mechaniczna maszyny indukcyjnej Model obwodowy SI na rys. 1.4, przy założeniu
IMG207 207 Ry*. 17.2. Charakterystyka mechaniczna silnika bocznikowego Rys. 17.3. Charakterystyka me
CCF20111125�011 (4) Rys. 16. Charakterystyki mechaniczne silnika szeregowego z samowzbudzeniem.4.2.
CCF20111125�019 (2) Rys. 26. Charakterystyczna mechaniczna silnika bocznikowego (obcowzbudnego)
CCF20111125�020 Rys. 28. Charakterystyki mechaniczne silnika obcowzbudnego. Rezystancję podano
143 Silniki indukcyjne budowane w Dolmel Drives Lid. Rys. 1. Charakterystyki rozruchowe silnika klat
Rys. 1. Typowe charakterystyki mechaniczne silników elektrycznych 1 - synchroniczna, 2 - bocznikowa,
24 luty 07 (142) Rys. 3.134. Modyfikacja charakterystyki mechanicznej silnika napędowego zredukowane
więcej podobnych podstron