HPIM0814
5. Sterowanie robotów przemysłowych
5. Sterowanie robotów przemysłowych
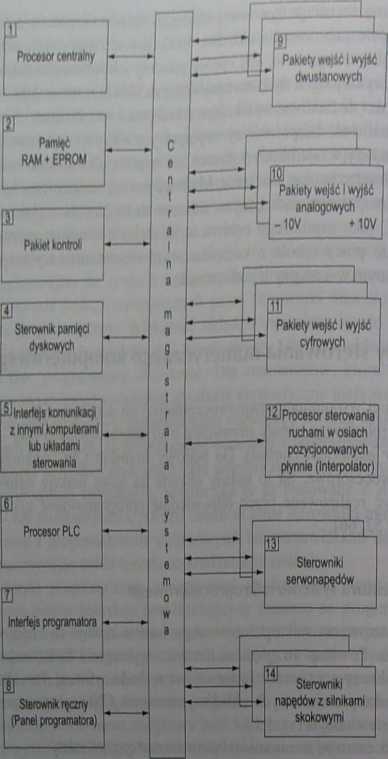
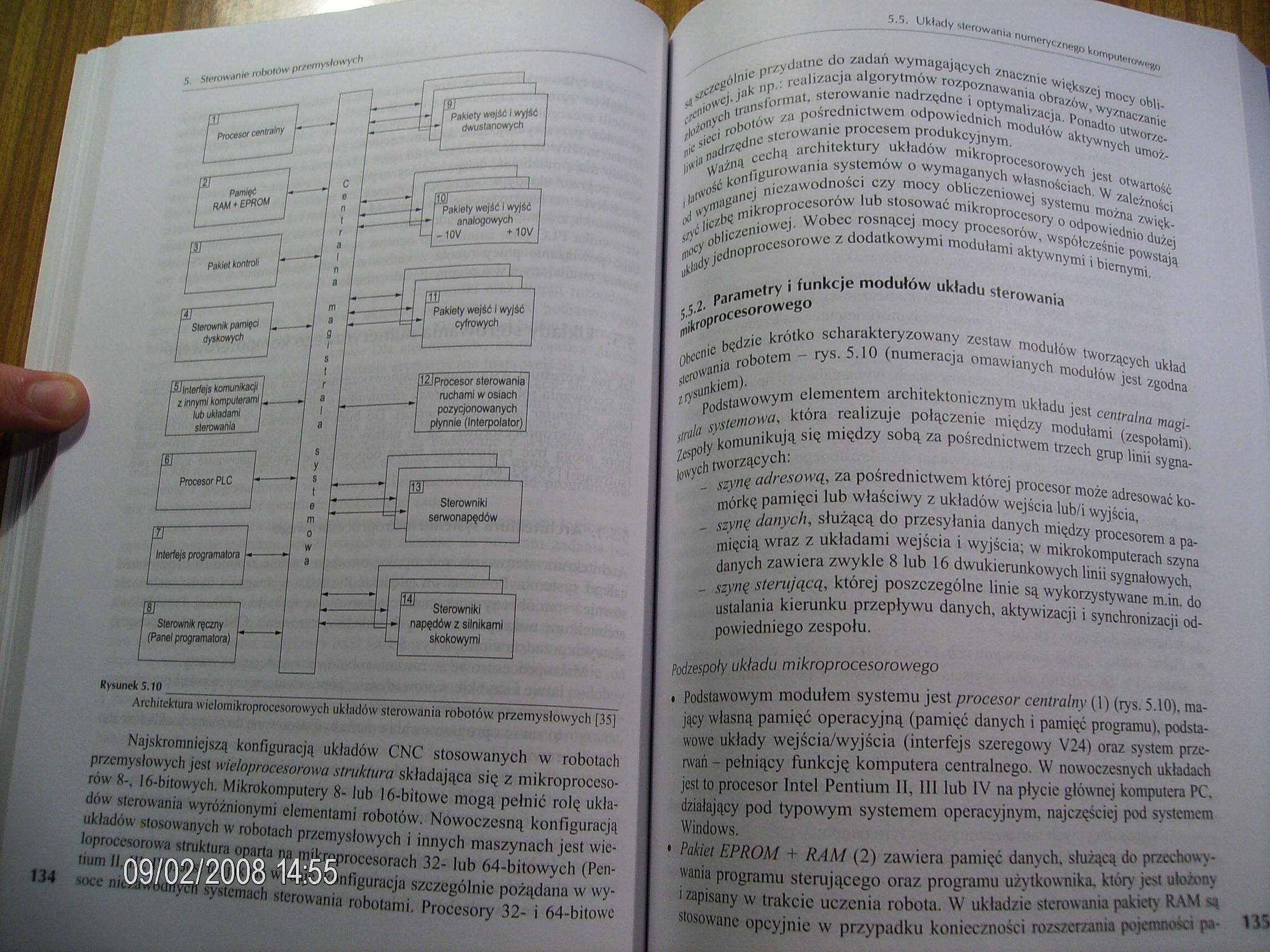
Architektura wielomikroprocesorowych układów sterowania robotów przemysłowych [35]
Rysunek 5.10_
Najskromniejszą konfiguracją układów CNC stosowanych w robotach przemysłowych jest wieloprocesorowa struktura składająca się z mikroprocesorów 8-, 16-bitowych. Mikrokomputery 8- lub 16-bitowe mogą pełnić rolą układów sterowania wyróżnionymi elementami robotów. Nowoczesną konfiguracją układów stosowanych w robotach przemysłowych i innych maszynach jest wieloprocesorowa struktura oparta na^mfewiroccsorach 32- lub 64-bitowych (Pen-p)@tifigui'acja szczególnie pożądana w wy* | HS^|ftfl3iBHBacb sterowania robotami. Procesory 32- i 64-bitowc
zególnie przydatne do zadań wymagających znacznie większej mocy obli-<11sZ! c;jak np.: realizacja algorytmów rozpoznawania obrazów, wyznaczanie ^ nyCh transformat, sterowanie nadrzędne i optymalizacja. Ponadto utworzc-/ icei robotów za pośrednictwem odpowiednich modułów aktywnych umoź-n>c.*nadrzędne sterowanie procesem produkcyjnym.
|i'v ważną cechą architektury układów mikroprocesorowych jest otwartość «yość konfigurowania systemów o wymaganych własnościach. W zależności H w)W6anej niezawodności czy mocy obliczeniowej systemu można zwięk-0 liczbę mikroprocesorów lub stosować mikroprocesory o odpowiednio dużej obliczeniowej. Wobec rosnącej mocy procesorów, współcześnie powstają ^Ifldy jednoprocesorowe z dodatkowymi modułami aktywnymi i biernymi.
c5,2. Parametry i funkcje modułów układu sterowania 'Jjkroprocesorowego
Obecnie będzie krótko scharakteryzowany zestaw modułów tworzących układ )crowania robotem — rys. 5.10 (numeracja omawianych modułów jest zgodna t rysunkiem).
Podstawowym elementem architektonicznym układu jest centralna magistrala systemowa, która realizuje połączenie między modułami (zespołami). Zespoty komunikują się między sobą za pośrednictwem trzech grup linii sygnałowych tworzących:
- szynę adresową., za pośrednictwem której procesor może adresować komórkę pamięci lub właściwy z układów wejścia lub/i wyjścia,
- szynę danych, służącą do przesyłania danych między procesorem a pamięcią wraz z układami wejścia i wyjścia; w mikrokomputerach szyna danych zawiera zwykle 8 lub 16 dwukierunkowych linii sygnałowych,
- szynę sterującąy której poszczególne linie są wykorzystywane m.in. do ustalania kierunku przepływu danych, aktywizacji i synchronizacji odpowiedniego zespołu.
Podzespoły układu mikroprocesorowego
• Podstawowym modułem systemu jest procesor centralny (1) (rys. 5.10), mający własną pamięć operacyjną (pamięć danych i pamięć programu), podstawowe układy wejścia/wyjścia (interfejs szeregowy V24) oraz system przerwań I pełniący funkcję komputera centralnego. W nowoczesnych układach jest to procesor Intel Pentium II, III lub IV na płycie głównej komputera PC, działający pod typowym systemem operacyjnym, najczęściej pod systemem Windows.
• Pakiet EPROM + RAM (2) zawiera pamięć danych, służącą do przechowywania programu sterującego oraz programu użytkownika, który jest ułożony i zapisany w trakcie uczenia robota. W układzie sterowania pakiety RAM są stosowane opcyjnie w przypadku konieczności rozszerzania pojemności pa-
115
Wyszukiwarka
Podobne podstrony:
HPIM0803 5. Sterowanie robotów przemysłowych — układów sterować Podstawową, najbardziej rozpowszechn
HPIM0811 5. Sterowanie robotów przemysłowych Tablica 5.1. Funkcje spełnione przez urządzenia elektry
HPIM0813 S. Sterowanie robotów przemysłowych do jednostki logicznej, w której informacje o wzajemnym
HPIM0819 5. Sterowanie robotów przemysłowych Tablica S.1 icd.) I Nr instrukcji Typ
HPIM0821 5, Sterowanie robotów przemysłowych Dlatego też nawigacja wirtualna musi być łączona z inny
HPIM0822 5. Sterowanie robotów przemysłowych gami wszystkich komórek wolnych i zajętych. Komórce poc
HPIM0808 5. Sterowanie robotów piwnystowych Roboty z układami o stałym programie (tzw. pick and plac
HPIM0812 5. Sterowanie robolów przemysłowych 5. Sterowanie robolów przemysłowych łącznika K3 - linia
HPIM0825 6. Napędy robotów pr/wnytłowych6.2. Napędy pneumatyczne Roboty przemysłowe z napędami pneum
HPIM0826 Napędy robotów przemysłowych Pneumatyczne Blok elementów wykonawczych napadu zawiera siłown
HPIM0829 6. Napędy robotów przemysłowych Zastosowanie napędów elektrohydraulicznych w robotach przem
HPIM0832 6. Napędy robotów przemysłowych 6A. Napędy elektryce Sygnał E na wyjściu regulatora położen
HPIM0839 6. Napędy robotów przemysłowych KpandcfcJ*_ Scbemay współpracy mechanizmu dźwigniowego i pr
HPIM0840 6. Napędy robotów przemysłowych a) b) c) Rysunek 6.31 Rodzaje przekł
HPIM0842 6. Napędy robotów przemysłowych Możliwości zastosowania przekładni zębatkowych do zamiany r
HPIM0806 5. Stwtiwjn* robotów prnmytlowyrh Interpolacja typu Splinc umożliwia uzyskanie bardzo gładk
HPIM0824 6. Napędy robolów przemytlowych 6.1. Przeznaczenie napędów i zakres ich
HPIM0828 6. Napędy robotów priemyilowyrh 6. Napędy robotów priemyilowyrh jest zbudowany jak chłodnic
HPIM0830 6. Napędy robolów przemysłowych 6.4.1. Napędy prądu stałego z silnikami komutatorowymi Stos
więcej podobnych podstron