DSCN0520
2. Geometria i kinematyka cwoiwenipmych pfzeklaJm walw*>e>>

12.71)
Uwzględniając proporcję:
(2.72)
możemy napisać:
Wielkość <4 określa średnicę koła podziałowego zastępczego. Odpowiadającą jej zastępczą liczbę zębów (o module ntj otrzymamy po przekształceniu zależności:
(2.74)
A więc
(2.75)
(2.76)
cosr&cos/T
Można też stosować wzór:
cosJ/T
który wynika z zależności geometrycznych dla elipsy uzyskiwanej z przekroju walca podziałowego.
Z zastępczej liczby zębów korzysta się też przy ustalaniu (z pewnym przybliżę-mcm) granicznych wartości parametrów uzębienia ze względu na podcięcie lub zaostrzenie u wierzchołka. Ponieważ przy ($ ?t 0 zastępcza liczba zębów zu jest większa od rzeczywistej, możliwe jest zastosowanie w kołach z zębami skośnymi mniejszej liczby zębów niż w kołach z zębami prostymi, bez obawy podcięcia lub zaostrzenia ich u wierzchołka.
2.2J. Odległość osi kół
Dwa koła zębate walcowe z zębami śrubowymi utworzą prawidłową przekładnię o osiach równoległych wówczas, gdy zęby obu kół wykonane będą według tego samego zarysu odniesienia oraz gdy będą miały przeciwne kierunki pochylenia linii śruoowych, a więc prawy i lewy, oraz taki sam kąt pochylenia Unii śruoowej zęba IJb Irys. 2.51) lub, co jest jednoznaczne, kąt IS.
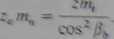
2.2 Ocomcuui kół walęowych o izbach skośnych
Ze względu na występowanie prawidłowej ewolweniy w przekroju czołowym, a stąd możliwości uzyskania wprosi zależności związanych z kształtem ewolweniy. obliczenia zazębienia śrubowego przeprowadza się najczęściej dla lego przekroju.

Rys. 2.51. Współpraca powierzchni cwolwcntowych w zazębieniu skośnym. PR — linia styku zębów
Wówczas wzory dotyczące zazębienia kół walcowych o zębach prostych nadawać się będą do obliczeń zazębienia śrubowego, oczy wiście, jeżeli podstawi się do nich odpowiednie wielkości geometryczne określone dla przekroju czołowego.
Korzystając z wzorów (2.37) i (2.66), możemy obliczyć odległość osi kół skośnych:
Ur+CjJm, cos a, (cl + c>)m„ cos a,
u = .........- = ■ - (2.77)
2 COS3t,w 2 COs/f COS Oj.
Potrzebny tu kąt przyporu toczny w przekroju czołowym obliczamy z funkcji ewolwentowej [wzór (2.41)]:
x.+ x> s __
mvct,„ = 2tgon-+ 11^0*.. (2.7S)
Ji+*ł
Toczny kąt przyporu xow dla przekroju normalnego obliczamy z zależności;
tg*0w = tg^cos^. (2.79)
Należy przy tym pamiętać, że wszystkie współczynniki wysokościowe zęba (/ij. c*. xt i x2), a więc i występujące we wzorze (2.7$) współczynniki przesunięcia zarysu zębów, odnoszone są do modułu normalnego ze względu na to, że parametry w przekroju normalnym związane są ze znormalizowanym zarysem odniesienia.
Wyszukiwarka
Podobne podstrony:
DSCN0501 .w 2. Geometria i kinematyka ewolwcntowych przekładni walcowych Zarys zęba jesi symetryczny
DSCN0502 2. Geometria i kinematyka cwolwcntowych przekładni walcowych Rys. 24. Frezowanie kształtowe
DSCN0503 2. Geometria i kinematyka ewolwentowych przekładni walcowych ■sina Dla zalecanej wartości l
DSCN0508 2. Geometria i kinematyka ewolwentowych przekładni walcowych dość istotna jest w obliczenia
DSCN0510 I & i Geometria i kinematyka ewolwentowych przekładni walcowych Wynik
DSCN0514 2. Geometria i kinematyka ęwolwcniowych przekładni walcowych 64 Po wstawieniu odpowiednich
DSCN0504 44 2 Geometria i kinematyka cwolwcnlowych przekładni walcowych 44 2 Geometria i kinematyka
DSCN0509 I 54_2. Geometria i kinematyka cwolwcntowych przekładni walcowych Ze względu na to, że lini
DSCN0513 62_2. Geometria i kinematyka cwolwcntowych przekładni walcowych_ wzorów (rys. 2.33): c, = «
DSCN0515 66 2. Geometria i kinematyka cwolwenlowych przekładni walcowych wzajemnie położone, aby okr
DSCN0516 I 68_2. Geometria i kinematyka cwplwcntowych przekładni walcowych Kolejny warunek nieinierf
DSCN0519 74 2. Geometria i kinematyka cwolwcntówych przekładni walcowych Stąd =
DSCN0522 i i 80 2 Geometria i kinematyka cwolwcntowych przekładni walcowych Rys. 153. Długości linii
DSCN0524 85 84 2. Geometria i kinematyka cwolwcntowych przekładni walcowych 2.3. Kinematyka przekład
DSCN0526 88 2. Geometria i kinematyka ewolwentowych przekładni walcowych Prędkość poślizgu zmienia s
2013 Editor: KAŹMIERCZAK). The average length of professional experience of the respondents was 12,7
12 (71) MAKROEKONOMIA 1. Rozporządzalne dochody gospodąrstw doąiowyęhi to: X Kur
2010 r. — Jóźwik J., Włodarczyk M.. Ścierka T.: Model geometryczny i kinematyczny
062 3 Ciąg geometryczny <- z równania x + f = 14 obliczamy t z równania y + z = 12 obliczamy z y1
więcej podobnych podstron